
QUBE – Servo 2
Versatile teaching platform for controls and mechatronics
The Quanser QUBE™-Servo 2 is a fully integrated, modular servomotor lab experiment designed for teaching mechatronics and control concepts at the undergraduate level.

Gallery




Product Details
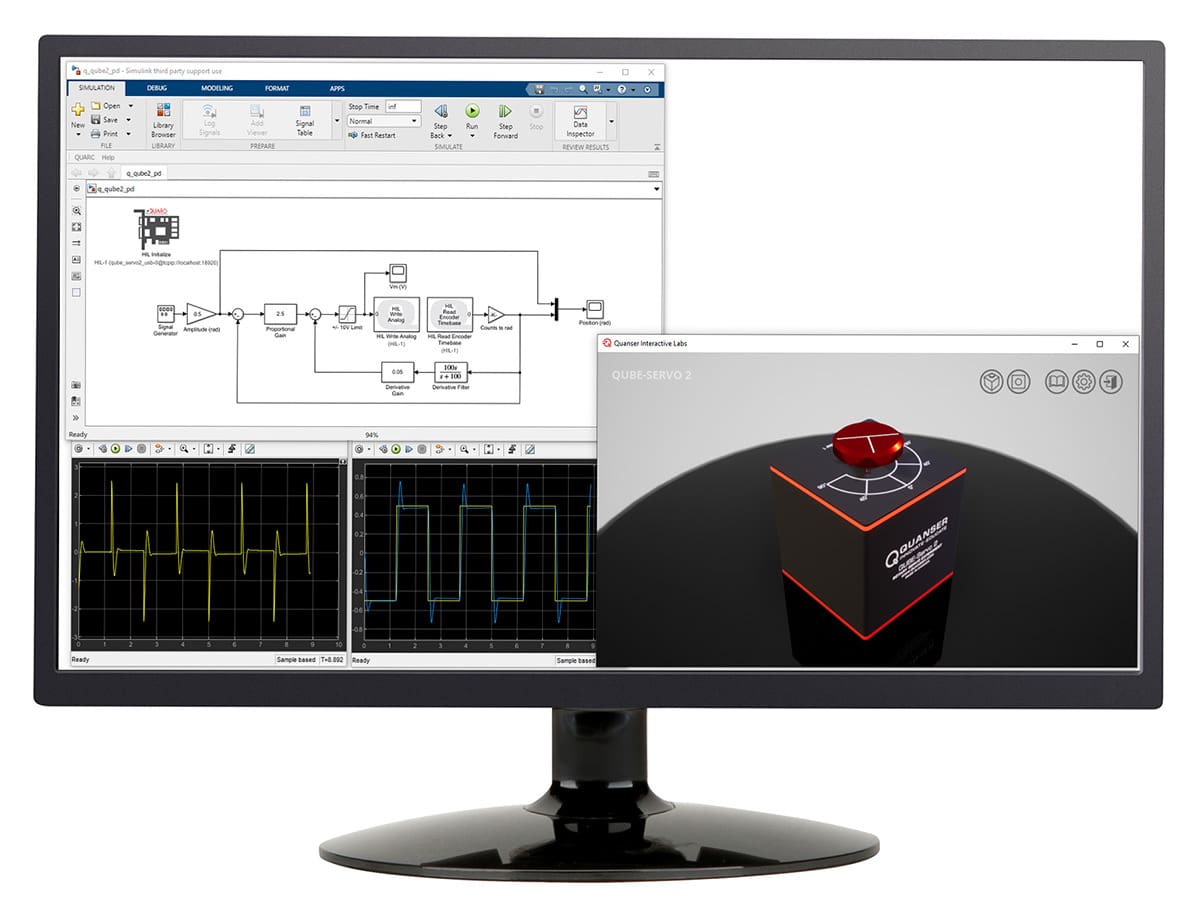
Integrating Quanser-developed QFLEX 2 computing interface technology, QUBE-Servo 2 provides more flexibility in lab configurations, using a PC, or microcontrollers, such as NI myRIO, Arduino and Raspberry Pi. With the comprehensive course materials included, you can build a state-of-the-art undergraduate teaching lab for your mechatronics or control courses, and engage students in various design and capstone projects.
- Compact and integrated rotary servo system
- Tool-less quick connect module inter face
- Direct-drive brushed DC motor
- High resolution optical encoder
- Built-in voltage amplifier with integrated current and tachometer sensors
- Integrated data acquisition (DAQ) device
- Flexible QFLEX 2 computing interface for USB and SPI/QBus connections
- User-controllable tri-color LED
- Easy-connect cables and connectors
- Open architecture design, allowing users to design their own controller
- Fully compatible with MATLAB®/Simulink® and LabVIEW™
- Fully documented system models and parameters provided for MATLAB®/Simulink®, LabVIEW™
- Microcontroller examples and interfacing datasheet provided for the QUBE-Servo 2 Embedded
| Dimensions (W x L x H) | 10.2 cm x 10.2 cm x 11.7 cm |
| Mass | 1.2 kg |
| Inertia disk mass | 0.054 kg |
| Pendulum mass | 0.100 kg |
| Pendulum length (pivot to tip) | 9.5 cm |
| Motor and pendulum encoder resolution (non-quadrature decoding) | 512 counts/revolution |
| DC motor nominal input voltage | 18 V |
| DC motor nominal current | 0.54 A |
| DC motor nominal speed (no load) | 4050 RPM |
| Connectors: – QFLEX 2 USB – QFLEX 2 Embedded – QFLEX 2 NI myRIO |
Standard USB 2.0 connector SPI A/B connector |
Inertia Disk Module
- Hardware integration
- Filtering
- Step response modeling
- Block diagram modeling
- Parameter estimation
- Frequency response modeling
- State-space modeling
- Friction identification
- Stability analysis
- Second-order systems
- Routh-Hurwitz stability
- Nyquist stability
- PD control
- Lead Compensator
- Proportional control
- Steady-state error
- Load disturbance
- Robustness
- Optimal control
- Introduction to digital control
- Discrete stability
- Introduction to discrete control
Pendulum Module
- Moment of inertia
- Pendulum modeling
- State-space modeling
- Pendulum balance control
- Swing-up control
- LQR state-feedback balance control
- Pole-placement state-feedback balance control
The following additional components are required to complete your workstation, and are sold separately:
For USB QFLEX Panel
- QUARC® add-on for MATLAB®/Simulink®
For NI myRIO QFLEX Panel
- NI myRIO embedded device
For Embedded QFLEX Panel
- Microprocessor (e.g. Arduino, Raspberry Pi)
Click here to view our comprehensive mapping tool which allows you to align courseware sections with specific chapters of the Experience Controls textbook app, as well as the most popular engineering textbooks such as:
Control Systems Engineering – N.S. Wise
Feedback Systems – K.J. Astrom & R.M. Murray
Feedback Control of Dynamic Systems – G.F. Franklin, J.D. Powell & A. Emami-Naeini
Modern Control Systems – R.C. Dorf & R.H. Bishop
Modern Control Engineering – K. Ogata
Automatic Control Systems – F. Golnaraghi & B.C. Kuo
Control Systems Engineering – I.J. Nagrath & M. Gopal
Mechatronics – W. Bolton
Related Products
QLabs Virtual QUBE-Servo 2
Virtual platform for distance and blended undergraduate control systems courses

QLabs Controls
Credible lab activities accessible off-campus

Rotary Servo Base Unit
Foundational modular control experiment

Rotary Inverted Pendulum
A classic modeling and control systems experiment

Rotary Double Inverted Pendulum
Take the classic inverted pendulum challenge to the next level

