
When we launched the Experience Controls mobile textbook, one of the pillars that we used to differentiate it from other e-textbooks was the fact that it was infinitely updateable. By nature of being an app, we could serve a better version of the book to users every few weeks or months, with no additional cost and no waiting time.
This also allowed us to quickly implement any feedback that you gave us. Throughout our discussions with the Experience Controls users, there were a number of suggestions that were raised, from missing topics to the ability to make the text larger. And while we can’t implement all of your feedback right away, some ideas came up so often that it only made sense to address them as soon as possible.
New Textbook Chapter: LQR Control
In the March update, we will introduce a new Advanced Control chapter, with the first module on LQR Control.
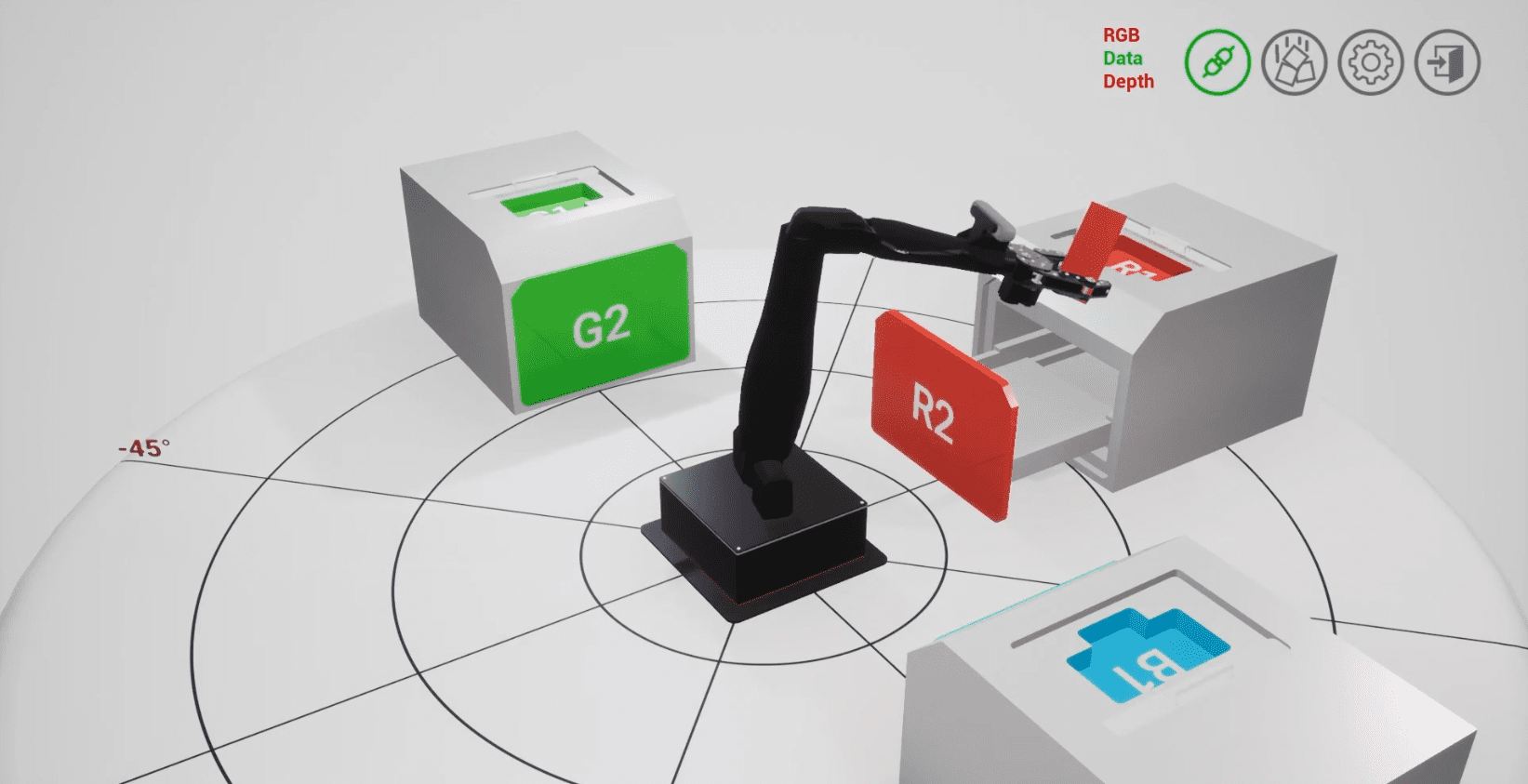
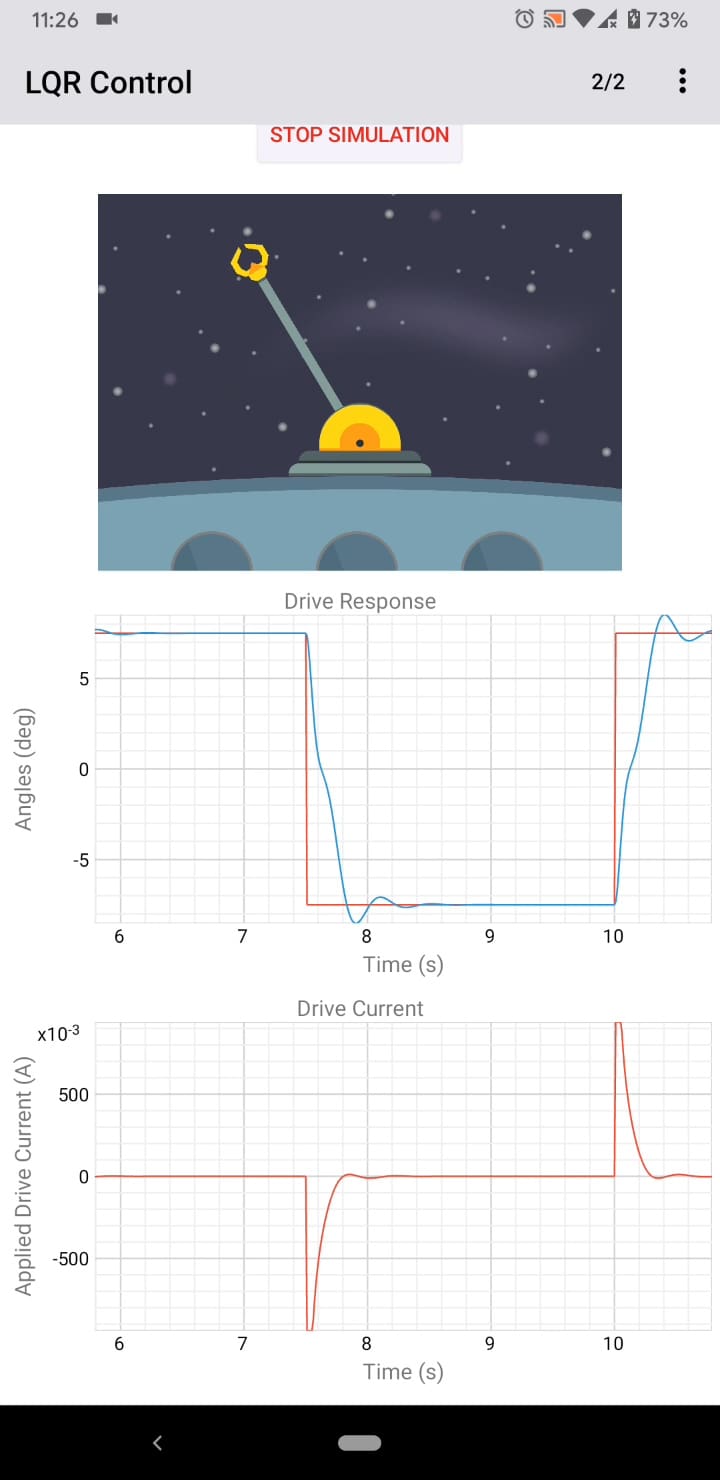
When software is used, LQR control is an efficient and straightforward way to design an optimized state-feedback controller. However, the use of matrix math and the traditional pen-to-paper approach to learning this design method often leads to confusion among students. That’s why, in addition to the theory behind linear quadratic regulator control, we included a simulation of a flexible robot arm with an applied angular joint command.
Users can adjust the Q and R weighting matrices to affect the gain K, and see the changes in deflection and vibration in the joint in the accompanying animation. The simplified simulation controls allow the user to quickly and easily adjust the weighting values without having to do heavy calculations. The LQR Control module also includes check-your-understanding-style questions to ensure that users are inferring the correct information from the simulation.
Hands-on Experience with LQR Control
But there’s more to help students master the LQR Control concepts. Through the Remote Hardware Experience module, they can access the Quanser AERO system, and see how different control design approaches impact the response of the actual system. Students can adjust the pitch and yaw control gains and see how PD Control and LQR Optimization impact the response of an actual system. That sounds like much more fun than just reading about different control design approaches in a traditional textbook, doesn’t it?
So, let your students know about the Experience Controls textbook and the new LQR module. We hope it will keep playing an important part in your course and in your students’ success.
If you have any more suggestions for topics you’d like to see in the textbook, comment below or email me!