In a previous blog post, we discussed our close collaboration with the University of New Mexico’s Electrical and Computer Engineering (ECE) department and its WHY Lab. The initiative gives freshman students a better sense of what ECE is. How? By answering three primary questions: “What do ECE engineers do?”, “How the heck do ECE engineers do things?”, and more importantly, “Why am I taking this course?!”
With its open-door policy, the WHY Lab has gone beyond the first-year experience. It has attracted senior students and their capstone projects.
The WHY Lab Goes beyond the First-Year Experience
The WHY Lab has become an exploration space for all ECE students. Experiencing its collection of high-fidelity cyber-physical systems attracts freshmen as well as seniors.
Naturally, the lab has drawn some of UNM’s brightest and more ambitious ECE students. Intrigued by the equipment Dr. Ramiro Jordan presented to his ECE 419’s class, three senior students wanted to see how they could utilize the lab as part of their capstone experience. As a result, Zennon Demeter, Roberto Velazquez, and Diego Toquinto came up with the idea for a capstone project. With me as their supervisor, they set to work on the “Advanced Haptic-based Tele-operation of an Unmanned Ground Vehicle.”
Advanced Capstone Project Combines Unmanned Systems with Haptics
The students executed their project in two phases. First, they developed a haptic feedback tele-operating mechanism for a Quanser QBot 2 ground robot using a Quanser HD^2 haptic platform. In the next step, they developed a haptic feedback virtual twin of the QBot 2 using the Unreal gaming engine.
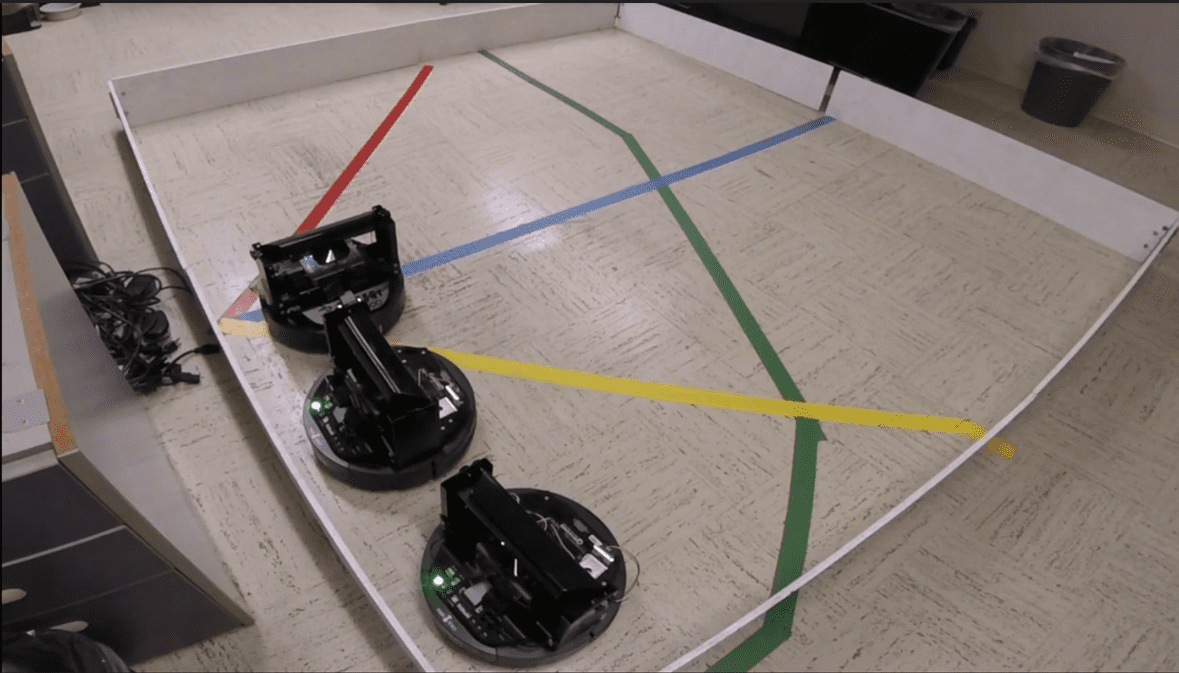
In the first phase of the project, students fully instrumented a physical QBot 2 and developed a series of Simulink controllers to manually drive the ground robot using the HD^2 haptic device, while providing haptic feedback to the operator. The haptic response was in the form of a sinusoidal rumble, indicating proximity to an obstacle (the amplitude of the rumble being inversely proportional to proximity), as well as a damping sinusoid followed by full locking of the HD^2 handle indicating a full stop.
The controller also provided haptic feedback indicating inclination of the ground robot. Wireless communication between the various controllers and the robot were implemented using the QUARC Basic Communications blockset over TCP/IP. Since the QBot 2 is a differential drive robot, the students programmed their controller to limit the HD^2 to only 2 degrees of freedom and used those control inputs to implement the differential drive by commanding linear and rotational velocities.
This video shows students tele-operating their QBot using the HD^2:
Here is the response of the IR sensors, and the haptic feedback generated as the QBot approaches an obstacle:
Virtual Twinning
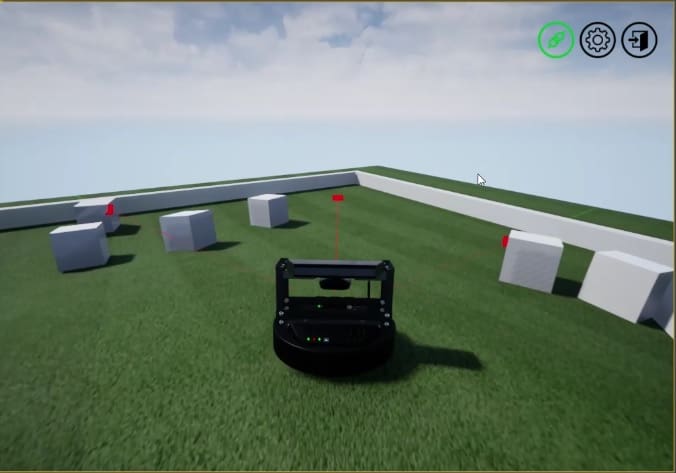
In the second phase of the project, students developed a virtual QBot 2 using the Unreal Engine 4 environment. The virtual environment simulated an uneven terrain with obstacles, as well as simulated sensors that provided distance, pose, and inclination feedback. The simulated sensor feedback was then fed over a TCP stream to a Simulink model that generated the appropriate haptic feedback on the HD^2.
A Sense of Achievement at the End of the Project
Supervising this capstone project, I took a slightly different approach. Typically students are asked to design a complete system from scratch. In such scenario, I’ve too often seen students going down a rabbit hole pretty fast. They end up frustrated, running out of time, and with poor results to present. Instead, I had the students start with a sound platform. Their task was to design and integrate the necessary hardware and software that made their haptic-based tele-operation mechanism a reality.
The students told me that the most important skill they got out of the experience was being able to connect key concepts from courses they had taken. The project gave them a real sense of achievement and closure for their undergrad experience.
The Project Represents UNM at the Capstone Showcase
Given the success of their project, they were selected by their peers to represent their department at the inaugural ExCEllence in Senior Design Showcase at the University of Texas at Dallas. The event provided an opportunity for ECE students in the US southwest region to showcase their design and problem-solving skills in a friendly competition.
If your students have been using Quanser systems for their capstone projects, we’d love to hear from you!
Acknowledgment: Special thanks to my colleagues Derek Wight and Karsin Lam who offered additional help and advice to the students throughout the project.