
QBot 2e

THIS PRODUCT IS NO LONGER AVAILABLE.
Click for information on QBot Platform.
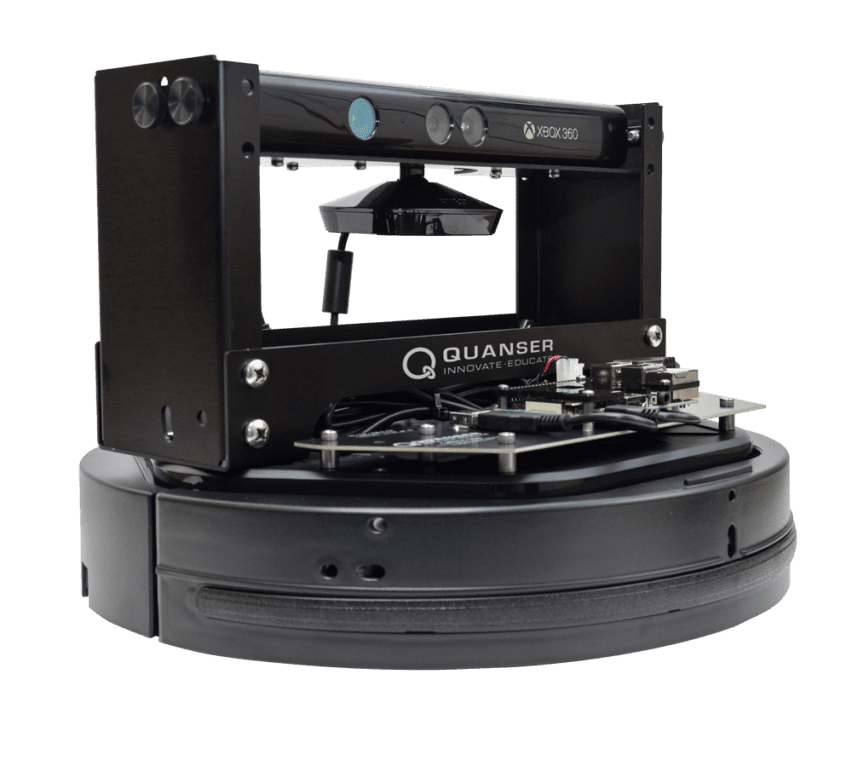
The Quanser QBot 2e is an innovative open-architecture autonomous ground robot, equipped with built-in sensors, and a vision system. Accompanied by extensive courseware, the QBot 2e is ideally suited for teaching undergraduate and advanced robotics and mechatronics courses, surpassing capabilities of hobby-level robotic platforms. The open-architecture control structure allows users to add other off-the-shelf sensors and customize the QBot 2e for their research needs.
Product Details
Click here for information on QBot 3.
The Quanser QBot 2e is an innovative open-architecture autonomous ground robot, equipped with built-in sensors, and a vision system. Accompanied by extensive courseware, the QBot 2e is ideally suited for teaching undergraduate and advanced robotics and mechatronics courses, surpassing capabilities of hobby-level robotic platforms. The open-architecture control structure allows users to add other off-the-shelf sensors and customize the QBot 2e for their research needs.
Group Citation: Mobile Robotics
Related Products
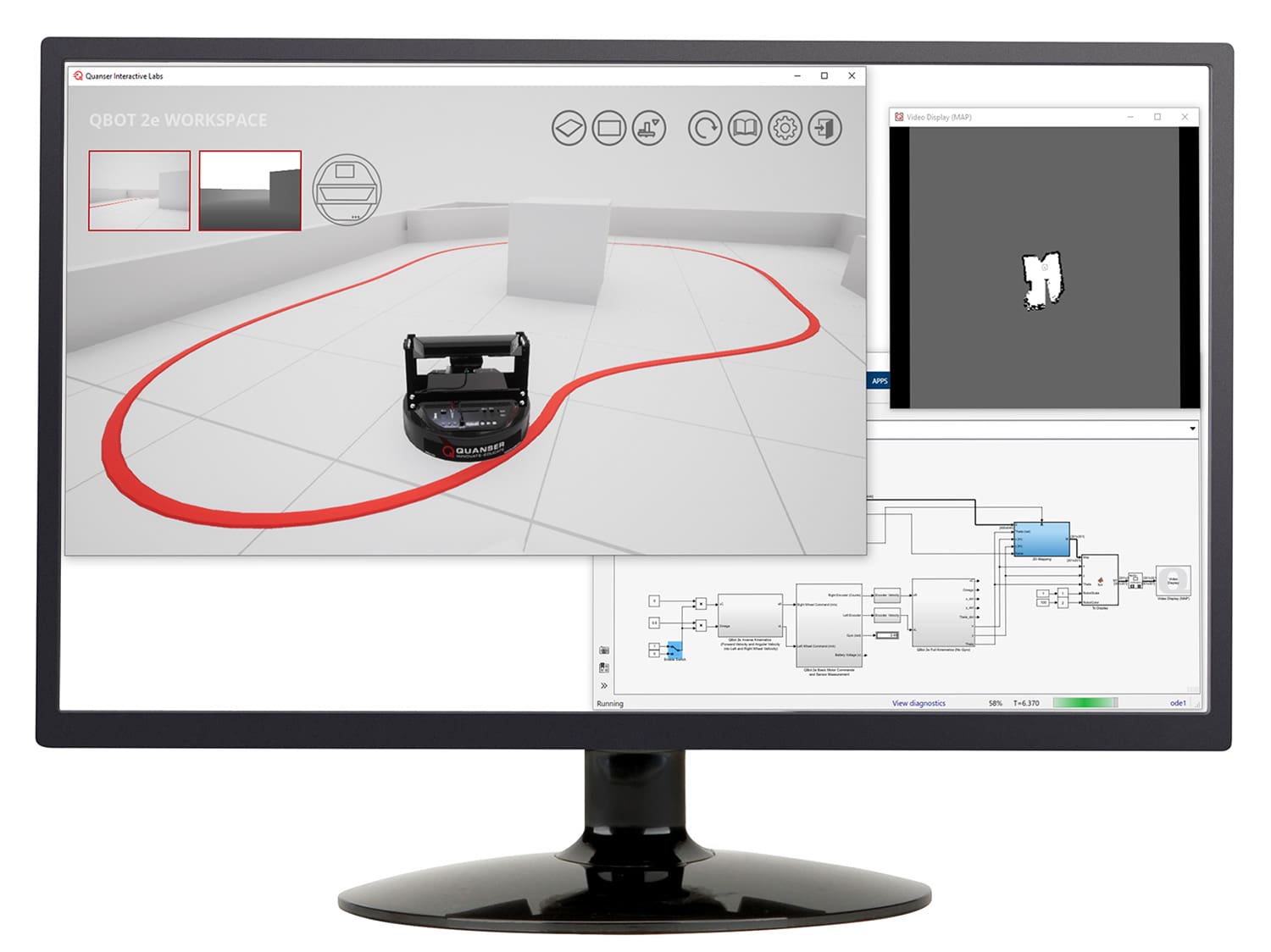
QLabs Virtual QBot 2e
THIS PRODUCT IS NO LONGER AVAILABLE.
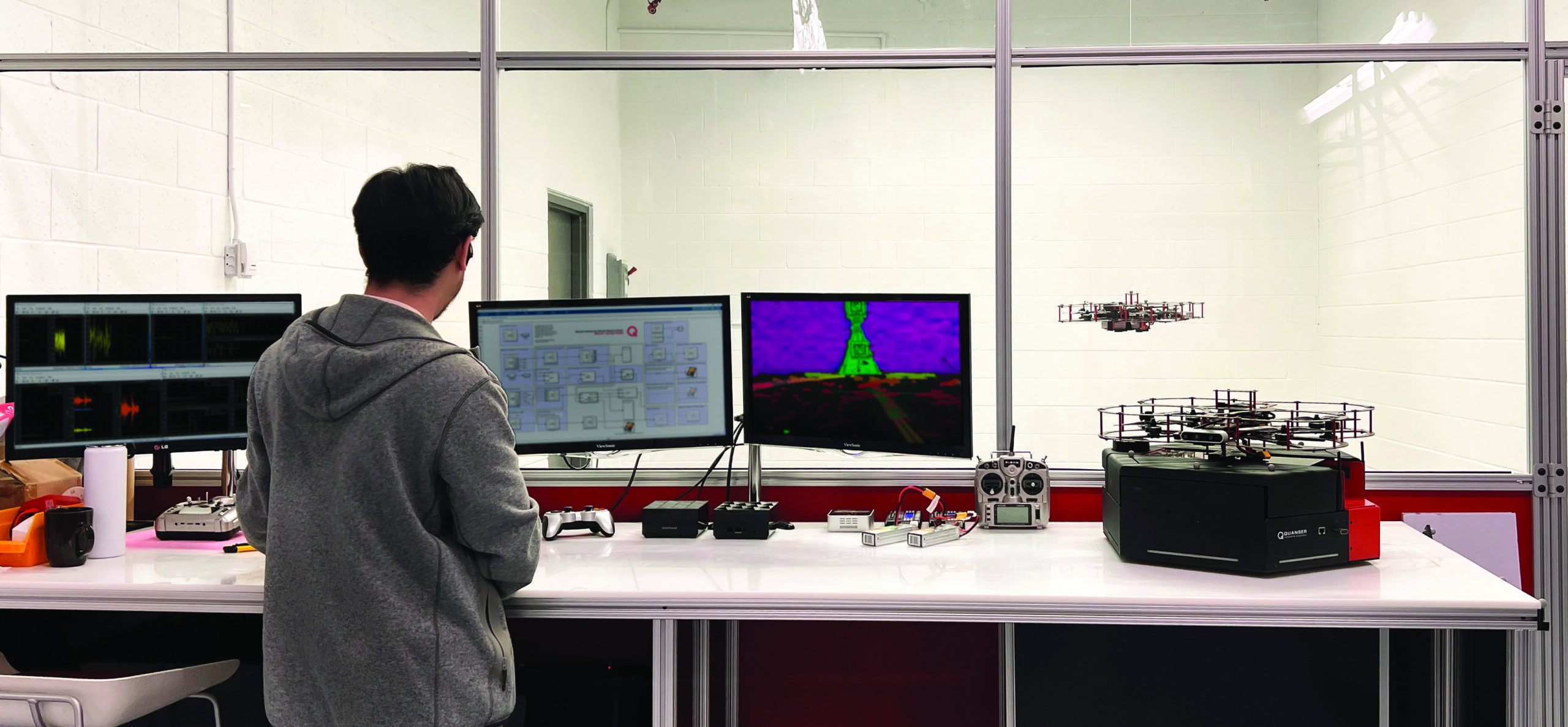
Drone Research Lab
A High-Performance Platform for Accelerating Drone Research.

QDrone
This product is no longer available.

Self-Driving Car Lab
A Complete Turnkey Ecosystem that Accelerates Research, Enhances Teaching, and Engages Students from Recruitment through Graduation.
