
QLabs Virtual QBot 2e

THIS PRODUCT IS NO LONGER AVAILABLE.
Click here for information on QLabs Virtual QBot Platform.
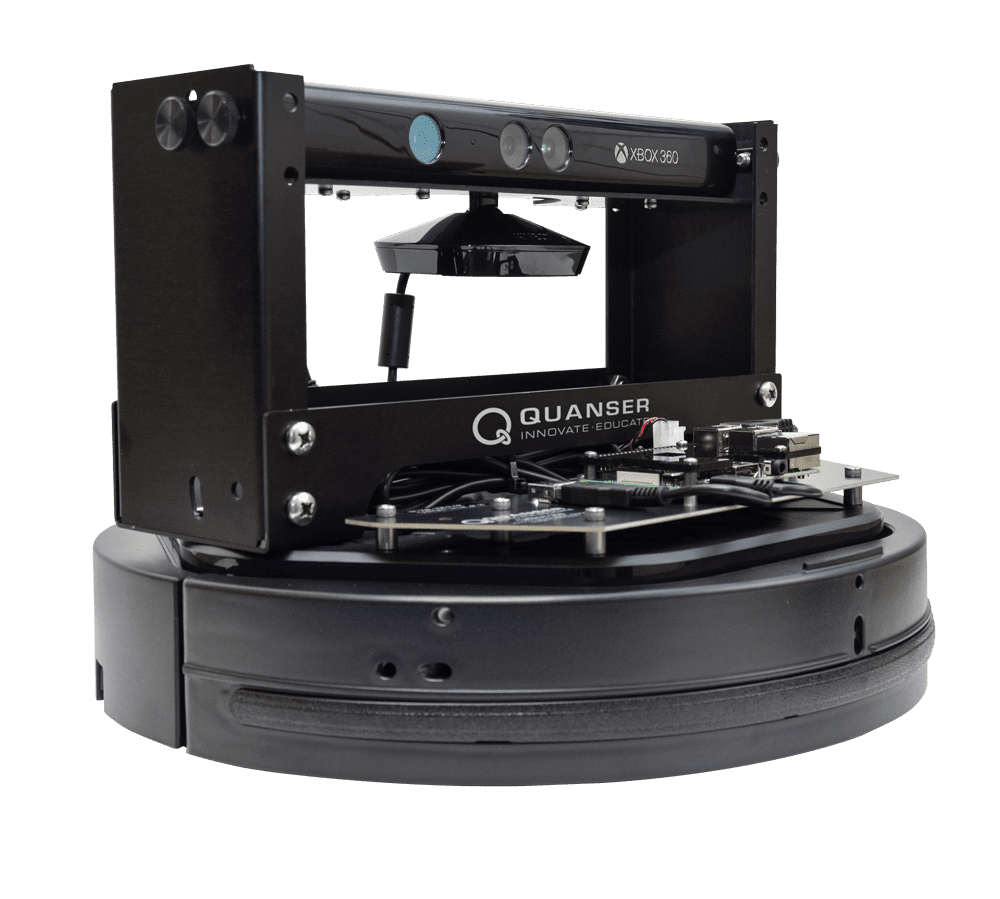
QLabs Virtual QBot 2e is a fully instrumented, dynamically accurate virtual twin of a classic Quanser QBot 2e system. It behaves in the same way as the physical hardware and can be measured and controlled using MATLAB®/Simulink® and other development environments. QLabs Virtual QBot 2e can enrich your lectures and activities in traditional labs, or bring credible, authentic model-based lab experiences into your distance and online robotics course.
QLabs Virtual QBot 2e is available as a 12-month, multi-seat subscription. The platform is compatible with the physical QBot 2e curriculum which covers concepts including differential drive, forward, and inverse kinematics, dead reckoning, odometric localization, path planning, obstacle avoidance, image acquisition, processing, and reasoning, localization and mapping, and vision-guided vehicle control.
Product Details
Same as the physical QBot 2e, the virtual system is an autonomous ground robot featuring built-in sensors and vision system.
- High-fidelity, credible lab experiences equivalent to use of physical lab equipment
- 12-month, multi-seat subscription
- Full access to system parameters through MATLAB®/Simulink®
- Comprehensive curriculum mapped to popular robotics textbooks
| QBot 2e virtual sensors | 3 digital bumper sensors 1 Z-axis angle measurement (heading) 1 Kinect RG&B sensor – Camera resolution: 640 x 480 – Depth sensing: 11 bit – Depth sensor range: 0.5 – 6 m |
| App download & access to subscription management | Quanser Academic Portal |
| App OS compatibility | Microsoft Windows 10 or later |
| Required software | Curriculum designed for MATLAB and Simulink R2021a or later, with compatibility with Python 3 |
| Minimum system requirements | Video Card: Intel HD 520 or equivalent DX11 GPU Processor: Core i5-6300U series mobile CPU or equivalent Memory: 8 GB RAM |
| Recommended system requirements | Video Card: Intel UHD 620 or equivalent GPU Processor: Core i7-8665U series mobile CPU or equivalent Memory: 16 GB RAM |
- Differential drive kinematics
- Forward and inverse kinematics
- Dead reckoning and odometric localization
- Path planning and obstacle avoidance
- 2D mapping and occupancy grid map
- Image acquisition, processing and reasoning
- Localization and mapping
- High-level control architecture of mobile robots
- Vision-guided vehicle control
Group Citation: Software
Explore more: All Research Paper
Related Products
QBot 2e
THIS PRODUCT IS NO LONGER AVAILABLE.
Drone Research Lab
A High-Performance Platform for Accelerating Drone Research.

QDrone
This product is no longer available.

Self-Driving Car Lab
A Complete Turnkey Ecosystem that Accelerates Research, Enhances Teaching, and Engages Students from Recruitment through Graduation.
