Webinar Details
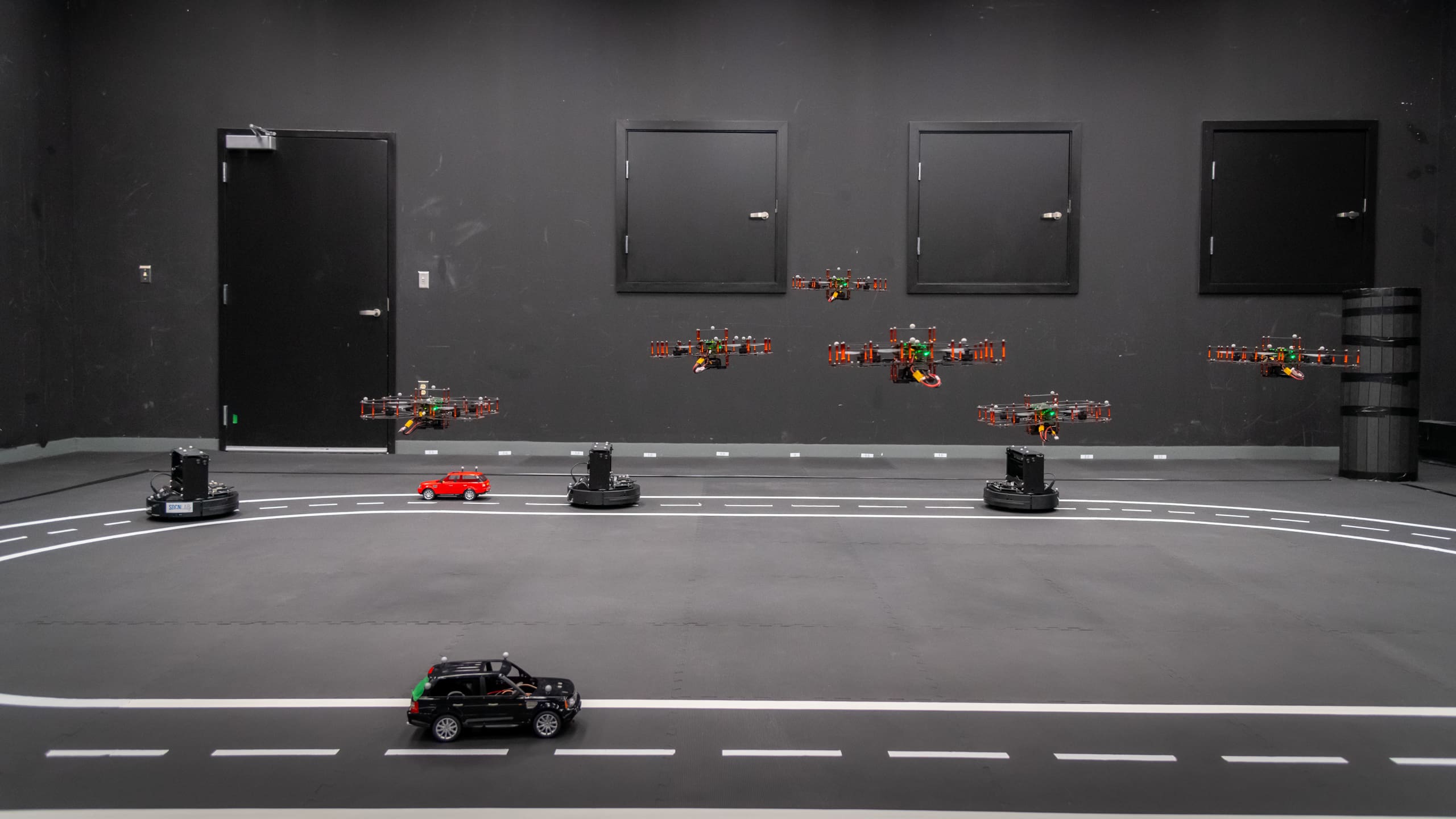
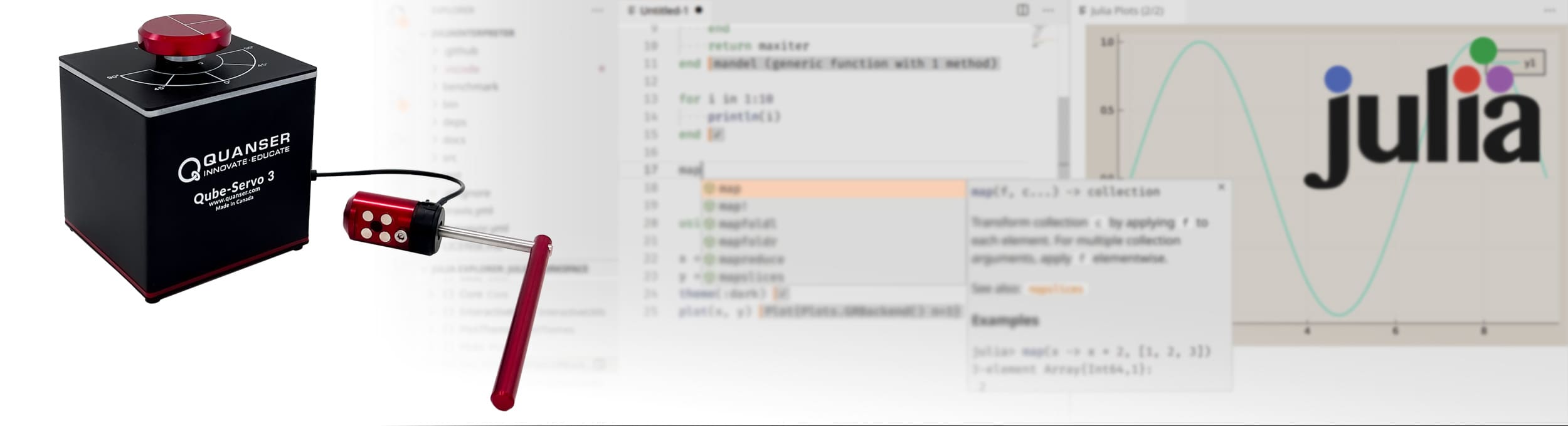
The Julia programming language is a high-level, high-performance dynamic programming language, commonly associated with technical computing. While offering interactive features similar to high-level languages like python, Julia is a compiled language, with performance comparable to traditional statically-typed languages like C or Fortran. In this talk, Dr. Fredrik will explore the use of Julia for modeling, simulation and control of dynamical systems. Particular details will be given on real-time considerations, exemplified by implementing and analyzing a swing-up controller for the Quanser Qube 3 rotary pendulum.

Presenter’s Bio

Dr. Fredrik Bagge Carlson
Fredrik received his MSc and Ph.D. from Dept. Automatic Control at Lund University. He has a background in robotics and an interest in developing software tools for simulation, identification and control, and is a coauthor of the JuliaControl suite of software for analysis and design of control systems in the Julia programming language. He is currently leading the control-systems team at JuliaHub, developing tools for model-based design and deployment of control systems.