
QUARC Real-Time Control Software

Accelerating control design
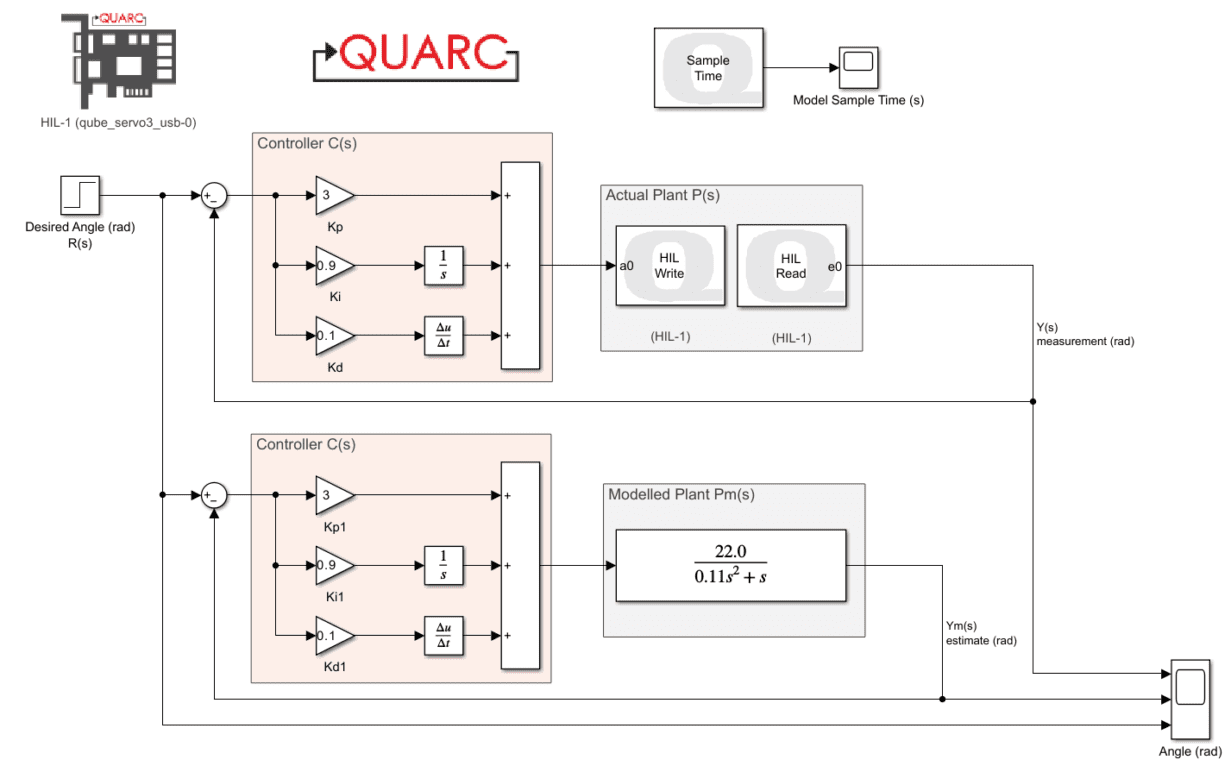
QUARC™ is the most efficient way to design, develop, deploy and validate real-time applications on hardware using Simulink®. QUARC generates real-time code directly from Simulink-designed controllers and runs it in real-time on the Windows target – all without digital signal processing or without writing a single line of code.
Product Details
- Overview
- Features
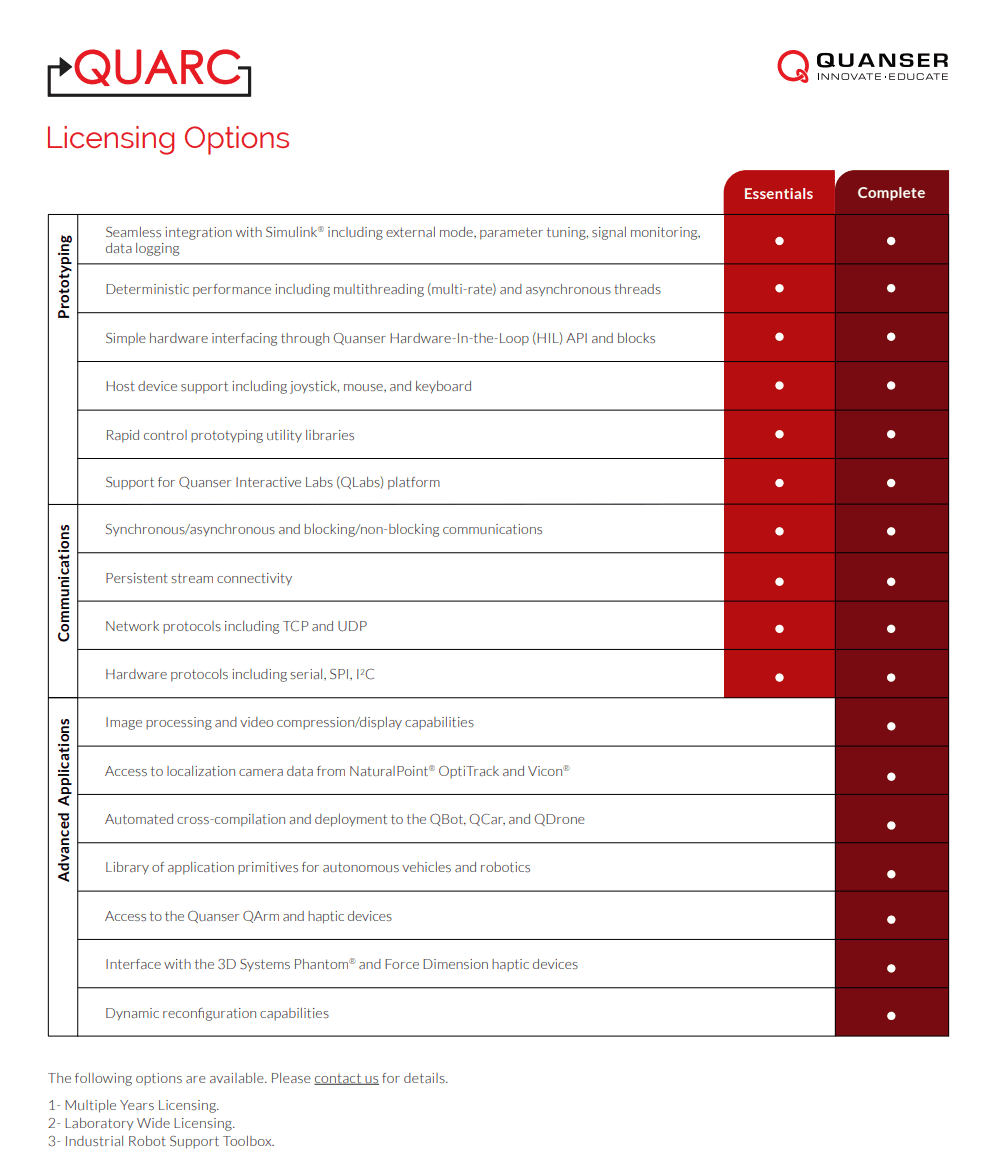
- QUARC Essentials
- QUARC Complete
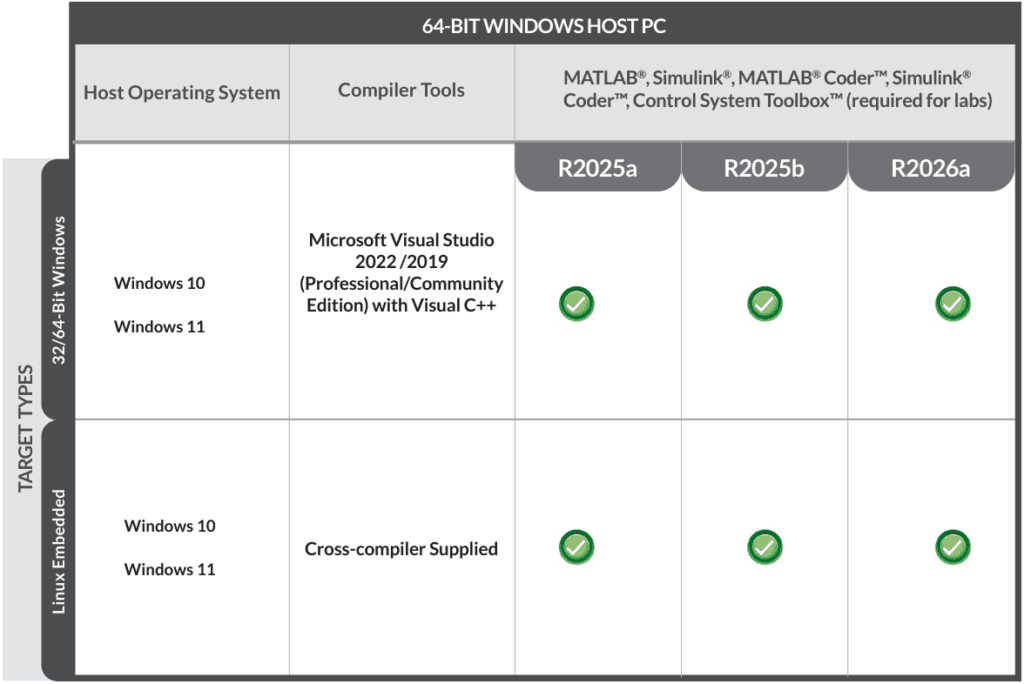
- System Requirements
- QUARC Installer & Documentation
- Previous Version Installer & Documentation
QUARC helps educators to bridge the gap between theoretical models and the real world. With QUARC, they don’t need to worry about interfacing to hardware or deterministic performance. Using the intuitive Simulink graphical interface, they can give students a systematic understanding of the design of complex systems and let them interact in real time. For researchers, QUARC makes developing algorithms fast and reliable. With an extensive set of cross-platform, research-grade libraries for control, communications, image processing, and more, they can deploy their algorithms to a wide variety of local and remote platforms with a push of a button.
Take full advantage of Quanser’s course resources to rapidly deploy an experiential teaching lab. Also the easiest way to communicate in real-time between any distribution of applications, at any rate, using any protocol.
- Enables the complete range of Quanser teaching products and course resources
- Support for the Simulink graphical development environment using external mode to enable real-time execution, parameter tuning, and data monitoring in Windows
- Quanser hardware-in-the-loop (HIL) API for fast and easy access to a wide variety of hardware devices from data acquisition cards and cameras, to user interface devices including joysticks and haptic wands
- Support for Quanser Interactive Labs (QLabs) Platform
- Direct interface to a variety of FLIR cameras for image processing
- Extensive library of utilities for rapid control prototyping
- Support for the NI myRIO and NI ELVIS III embedded platforms
- Real-time persistent and deterministic communications
- Support for data I/O using TCP/IP, UDP, shared memory, serial, SPI, I2C
- Execution options for communications include synchronous/asynchronous, blocking and non-blocking
Seamless application prototyping for autonomous multi-platform, multi-agent research, as well as rapid control prototyping for advanced robotics research.
- All features and capabilities of QUARC Essentials
- Support for autonomous systems including Quanser QCar, QBot mobile robots, as well as QDrone quadrotors
- Directly access localization data from NaturalPoint OptiTrack and Vicon camera systems
- Optimized application library for autonomous vehicles including reference frame operations, image processing, and video compression and transmission
- Hardware support for Quanser QArm and haptic devices
- Interact with your software using the 3D Systems Phantom and Force Dimension haptic devices
- Optimized application library for robotics including reference frame operations, kinematics, image processing, and video compression and transmission
- Dynamically reconfigure your code to provide flexible operating modes
Please check this chart to confirm that the operating system and third-party software installed on your host and target computers comply with requirements of QUARC™ 2026. This will allow you to successfully install and run the QUARC™ 2026.
Installation Guides:
For QUARC installation instructions, read the Quick Installation Guide (Local License) and visit the complete installation documentation page
Documentation:
For full details on QUARC features, visit the full documentation page and check the release notes.
DAQ Compatability:
Download QUARC 2026 DAQ Compatibility Chart.
Installers:
Documentation:
Group Citation: Software


Related Products
