
Most of us have been there. We’ve taken two-day delivery for granted. As the pandemic progressed the ripple effects from industrial shutdown permeated through, supply-chain driven delays started to infiltrate the daily lives of consumers everywhere. For most of us, this manifested itself as delayed presents during the holiday season. For Quanser, however, parts that used to require weeks to deliver were now taking months or even more than a year! These supply chain issues affected our ability to build and ship high-demand products consistently.
The QUBE-Servo 2 is one of our most popular products and is a great way to teach students about the fundamentals of servomotors while introducing control concepts in varying levels of complexity. Check out my colleague’s blog What’s with a Servomotor? to learn more about this! Early into 2022, we were hit with a critical update, the brushed coreless DC motors used in the QUBE-Servo 2 was not ready for shipment. With people continuing to place orders and a thinning inventory of Qube-Servos on our shelves, our solution was straightforward, we had to find a replacement motor. We decided to find a suitable replacement candidate, and while we were at it, also spent some time improving the product. This is where the idea for Qube-Servo 3 came from.
So what changed in the Qube-Servo? Let’s talk about it.
Software
We can start with the software. Part of what makes the Qube a great tool for teaching control theory is the excellent PWM amplifier linearity which you can normally only find in products like our VoltPAQ analog amplifiers. This was achieved through some magic embedded in the firmware in the QUBE-Servo 2. However, if you want to show a student how a “typical” amplifier behaves, the Qube-Servo 3 now has the option to disable the compensation factors and give you direct access to the PWM duty cycles.
Another exciting addition is that the Qube-Servo 3 will be the first Quanser device with official support on Windows, Mac OS, and Ubuntu! Windows support will be released first with Mac OS and Ubuntu later this year. Stay tuned for more details!
Let me introduce what changed physically in the Qube-Servo, both in terms of design and the motor we chose.

Left: Qube-Servo 2 Right: Qube-Servo 3
Design
The QFlex Panel is gone. If you are one of those who just flinched, do not worry! If you are interested in a Qube-Servo with myRIO support or an embedded panel for, we still have limited supply of QUBE-Servo 2s for you! However, most end-users opted for the QFlex USB panel, so we decided to incorporate that into the Qube-Servo Servo 3 itself which allowed us to improve other items on our list.
The USB port to connect the QUBE-Servo 2 to a computer used to be a USB-B port. Your students probably recognize this as the printer or Arduino cable, which means, losing a cable makes it harder to replace. With a USB-C cable, you can plug it either way and you don’t have to worry about availability or finding a replacement if anything happens to your cable.
Then there is the power switch and our LED light for it. The switch fully disconnects power to all components of the Qube-Servo 3, which means your it can be left plugged in. As soon as you want to use it, just flip the switch, the LED will turn on and it’s ready to use!

Motor
Let’s talk about the most important component in the Qube-Servo, the servomotor itself. We had to find a motor with specifications similar to what we had for QUBE-Servo 2.
What makes a good replacement? We needed a motor with low friction and coreless (no cogging), since low-voltage actuation gives you the control fidelity to balance a pendulum. We wanted a motor with lower torque and current for stall conditions required by certain labs. We also required a similar motor speed constant and low resistance to allow consistency with most of the QUBE-Servo 2 labs and across the curriculum as discussed later.
We went and tested tens of motors from companies around the world, looking for the most suitable replacement for our current motor. Once we brought that list down to less than 5 motors, we focused on consistency. We ordered large batches of the motors, testing them for variability from unit to unit. In the end, no matter where we send the Qube-Servo in the world, we know that the student experience will be reliably consistent and reproduceable. That brings us to the Qube-Servo curriculum.
Curriculum
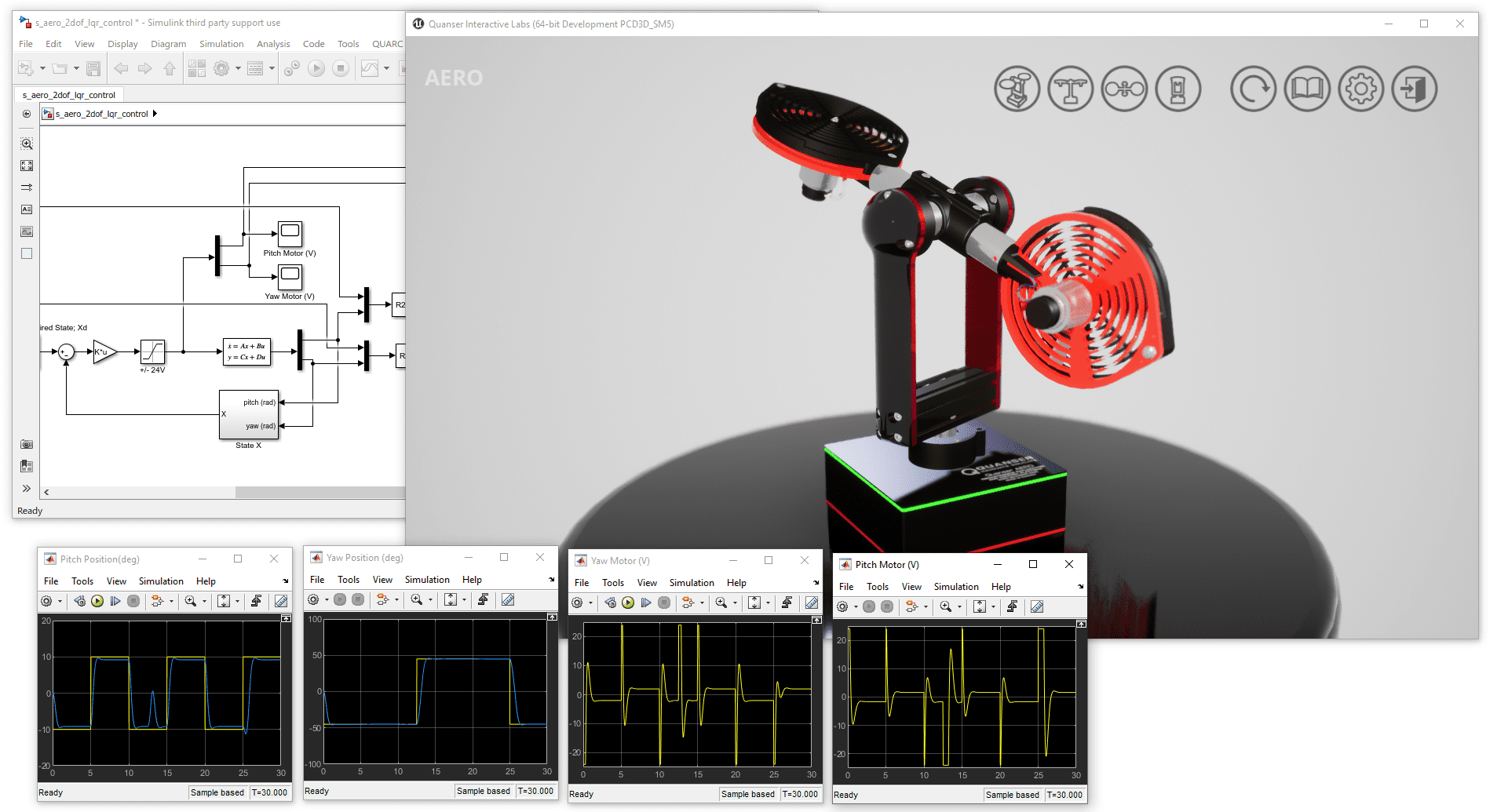
The introduction of Qube-Servo 3 led to an ongoing project to update the curriculum to our latest standards and introduce new content. We will continue to utilize Mathwork’s MATLAB and Simulink in combination with our QUARC real-time solution to teach most of our control-based content, but we’ve also been doing extensive testing with Python across all platforms. For those experienced with Python and utilizing our free hardware-in-the-loop (HIL) API, it is possible to achieve hardware-based timed loops for real-time control.
Already have a QUBE-Servo 2? Python support is already available! Ready to try a Qube-Servo 3? Even if the updated labs are not out yet, all QUBE-Servo 2 content will work with it! Given the similarities between the actuators inside the QUBE-Servo 2 and 3, all currently released curriculum and future releases will be compatible with both! On the same note, when we release new labs for Qube-Servo 3, you will still be able to use them with your existing QUBE-Servo 2! The Qube-Servo 3 will also be available in Quanser’s QLabs later this year in conjunction with these new content updates, but in the meantime, you can still use the virtual model of the QUBE-Servo 2.
Is there a particular topic you would like to see new content made for your Qubes? Let us know below in the comments!