
The earliest memory I have of a servo motor goes back to when I was 7 years old. I had been gifted an RC car, which had lasted me faithfully for over 2 years, but had inevitably failed. Waiting for the golden hours between having finished my homework and my dad getting home from work, I raided his toolbox for a jewelers screwdriver set. Phillips #1 and #2 made quick work of dismantling the chassis and getting me to the servo mechanism, full of discoveries my mind was yet to make. Taking apart the plastic gears and casing, I finally got down to a small cylinder with 2 leads poking out, bent out of shape from my tinkering. What followed, was weeks of using expensive 9V D batteries to make anything I could get my hands on to spin, CDs, toy fans, my sister’s troll doll… you name it.
This experience laid the foundation to a curiosity that carried me for years to come, eventually cascading me to a career in robotics engineering. A servomotor is a fundamental, flexible and foundational system for teaching engineering mechatronics, robotics and controls. In this blog, I want to offer some insight into it’s relevance in modern engineering curriculum, and how it can provide everlasting experiences for engineers of tomorrow.
Fundamentals
The servomotor comes complete with a DC brushless motor and a rotary encoder. By providing voltages or PWM, you can spin it, and subsequently sense this rotation using the encoder. With a single degree of freedom that can be actuated and sensed, it provides an entry level and fundamental system to students. In my opinion, two primary goals for engineering institutions in the first two formative years of undergraduate engineering programs are teaching fundamental concepts and encouraging curiosity.
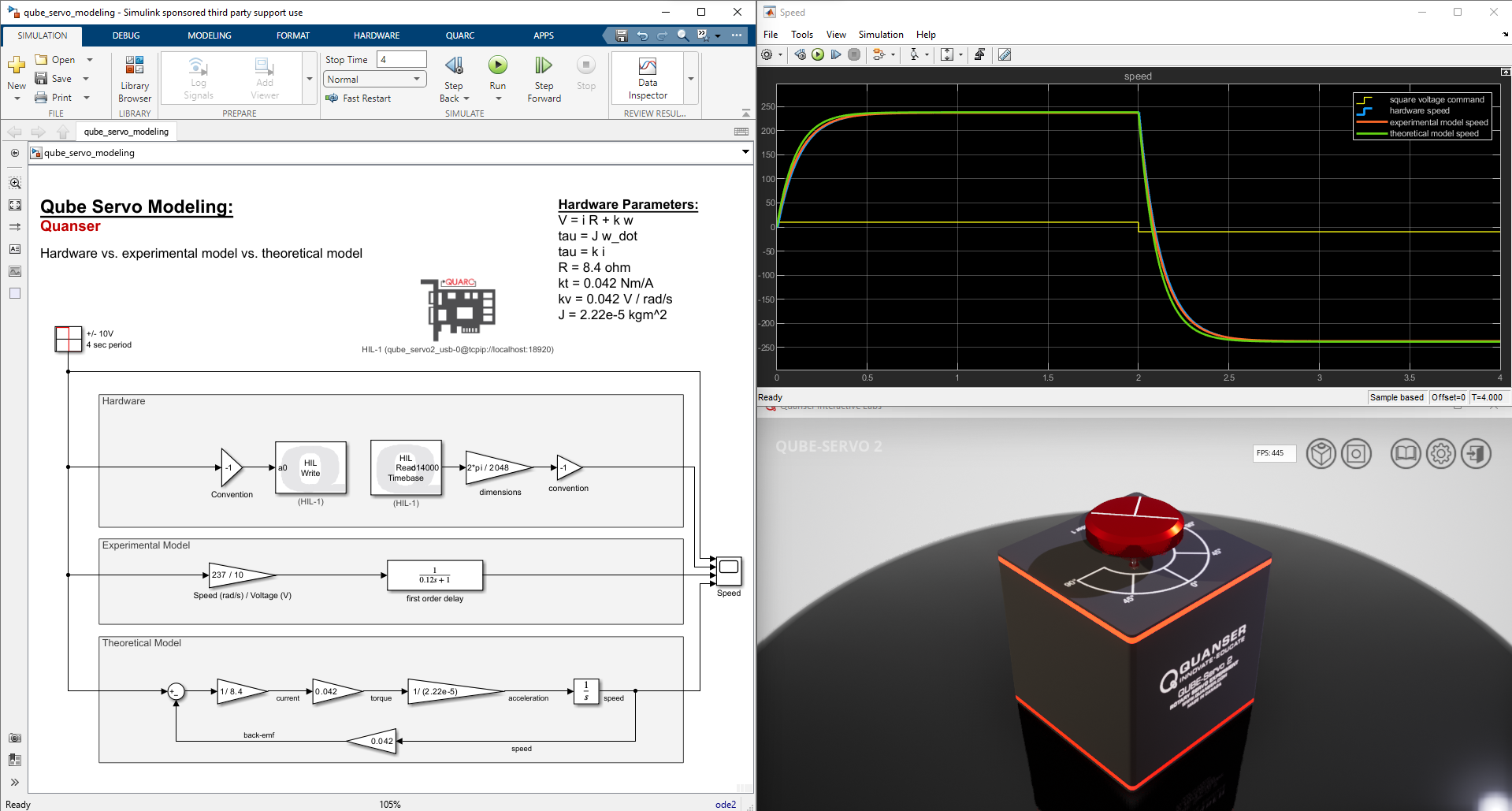
On one hand, by the end of their first undergraduate year in engineering, students are well versed with concepts related to modeling basic dynamic systems, basics of circuit elements and corresponding ordinary differential equations. Modeling a motor is one of the simplest activities a second year students could partake in, and having access to a system that they can model in an effective manner with an intuitive user-interface is essential. Without worrying about low-level interfacing details, students can quickly build up experimental and analytical models of the system and validate their understanding of the fundamentals.
On the other hand, almost every physical system has aspects that can be narrowed based on the nature of what the system is involved with – is it sensing something? Is it doing something? Is it communicating, or is it thinking? Armed with the fundamental understanding of and capability to do and sense with servomotors, students can look outward to use the system in projects early in their education. In my opinion, this contributes to an explanation towards why motors and encoders are so popular in second year engineering projects.
Flexibility
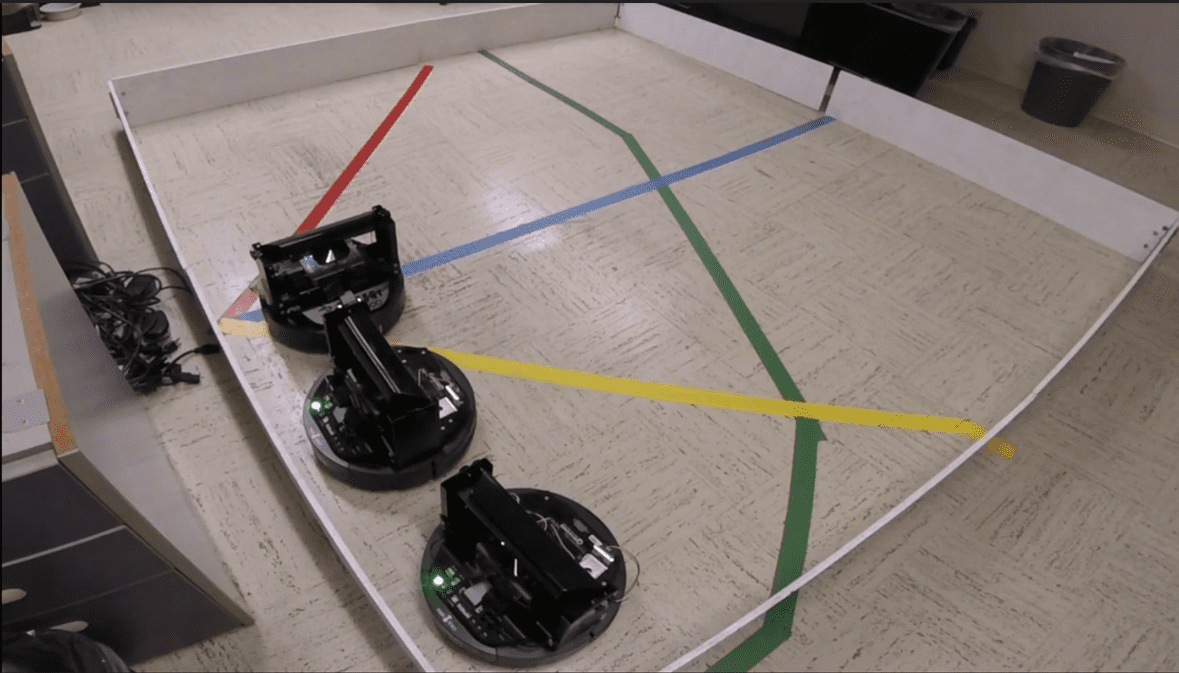
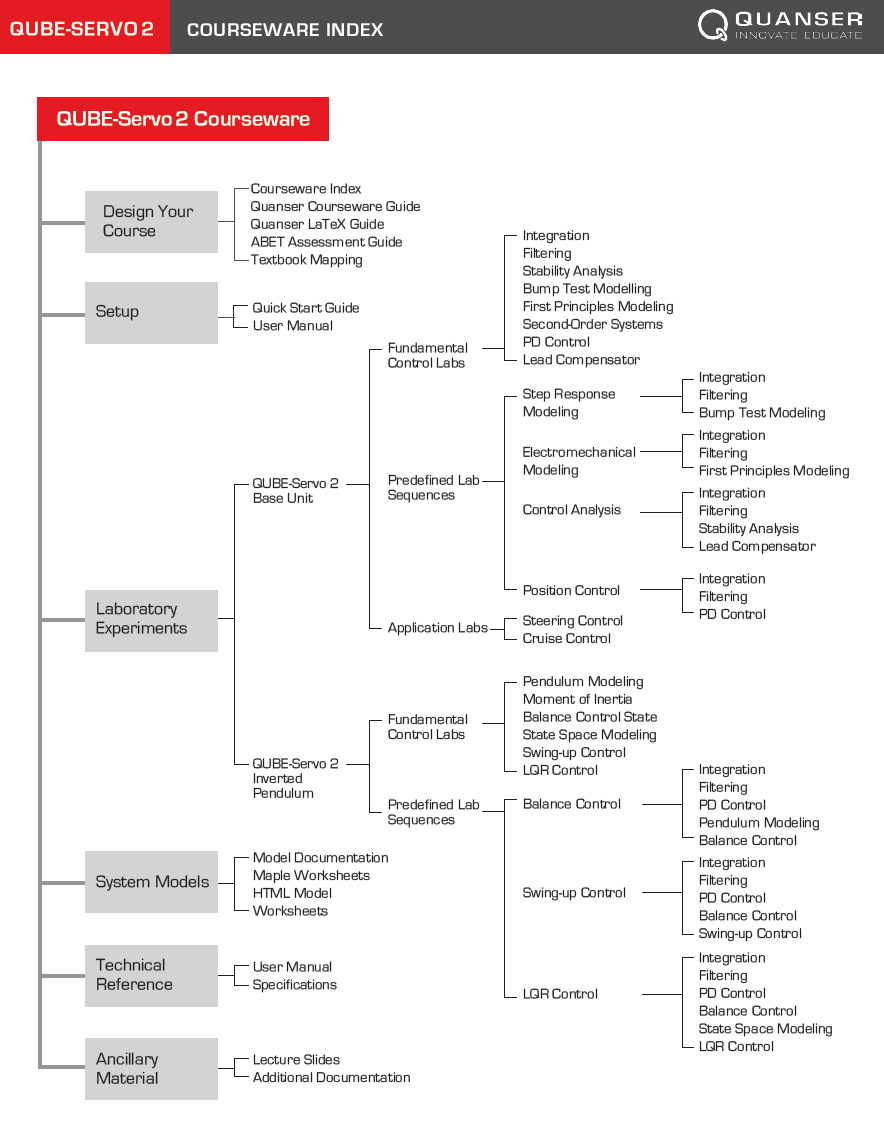
The servomotor is a single input single output (SISO) system. However, the number of concepts that can be taught with this system are countless! From system modeling (experimental bump test, system identification) and controls (PID, optimal, lead-lag, LQR), to project applications (visual servoing to track fiducial markers, ball-balancing, pendulum balancing, steering/speed control for autonomous vehicles). The QUBE Servo 2 for example, comes with over 30 labs on a variety of topics relevant to modeling, control design and implementation. This allows educators to enrich the student experience by expanding the relevance of such a fundamental system to third and fourth year concepts. Below, you can see a course mapping for the QUBE Servo 2 and the topics covered in it’s provided curriculum. These labs can be covered either with the physical QUBE Servo 2 device, or it’s digital twin based on Quanser Interactive Labs. You can find out more about a scalable approach to remote labs and leveraging Quanser’s digital experiences.
Foundation
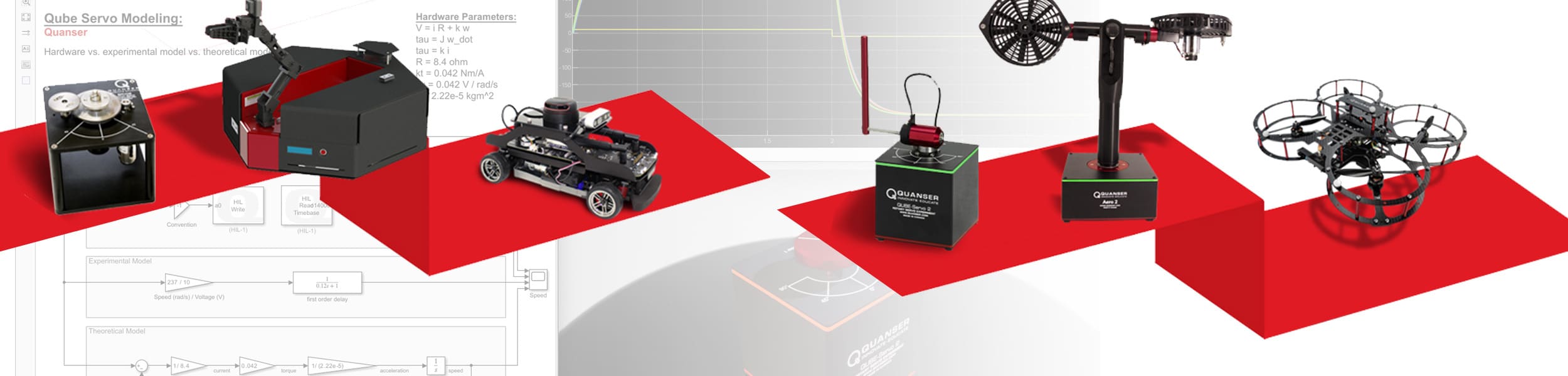
The servomotor is also a key component of a majority of modern complex cyber-physical systems. Consider a helicopter control problem for example. Fundamental concepts taught to students with the QUBE Servo 2 can be used to understand the actuation and sensing systems in the Quanser Aero 2 platform, which emulates the control challenges of a helicopter. With added aerospace knowledge base, students can further their understanding of alternate aerospace systems such as quadcopters on a QDrone 2. The same goes with the Rotary Servo system leading to mobile and manipulator robotics. This trend of cascading concepts on increasingly sophisticated systems with abstracted hardware experiences result in a practical industry-relevant mindset and set of skills.

Summary
Talk to any engineer at Quanser about servomotors, and we can go on for hours. The fundamental understanding of this system, our flexibility in adapting it to a variety of applications, and building complex systems upon the foundations of it’s basic mechanics bleeds into our academic philosophy and curriculum development. The QUBE Servo itself has gone through numerous iterations and curriculum updates. What is your first memory of using a servomotor? What did you do with it? Let me know below, and look forward to some exciting news related to the QUBE Servo in the coming months!