
QDrone 2

Quanser innovation unleashed in the autonomous vehicle research space
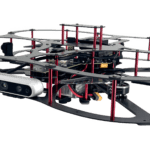
The Quanser QDrone 2 autonomous air vehicle is a midsized indoor quadrotor equipped with a powerful on-board NVIDIA Jetson Xavier NX system-on-module (SOM), multiple high resolution cameras and built-in WiFi. This open-architecture research-grade drone is tuned to accelerate your innovation in multi-agent, swarm, artificial intelligence, machine learning, and vision-based applications.


Gallery


Product Details
The optimized and robust carbon fiber frame makes the QDrone 2 highly maneuverable and capable of withstanding high-impact applications with little down time required for repairs between flights. The powerful on-board processor and multiple accelerated high-resolution cameras enable novel on-board video processing, as well as streaming for real-time monitoring.

Supported Software and APIs
|
| Dimensions | 50 x 50 x 15 cm |
| Weight (With Batteries) | ~1500 g |
| Max Payload | ~300 g |
| Power | 4S 14.8V LiPo (3700mAh) with XT60 connector |
| Flight Time | 7-8 minutes for hover per battery charge |
| Onboard Computer | NVIDIA Jetson Xavier NX SOM (powered by a 6-Core NVIDIA Carmel ARM v8.2 64-Bit processor) |
| 384-core NVIDIA Volta GPU with 48 Tensor Cores | |
| 8 GB 128-bit LPDDR4x RAM | |
| Expandable I/O | PWM (2x) |
| UART (2x) | |
| SPI (2x SS pins ) | |
| I²(2x) | |
| ADC (1x) |
|
| Encoder input (2x) | |
| CPU GPIO (6x) | |
| Intel® RealSense™ (D435) | Depth sensing: (3 metre range) |
| RGB (1920X1080) @ 30 FPS) | |
| Omnivision OV9281 | Grayscale (1280×800 @ 120 FPS or 640×480 @ 180 FPS) |
| Sony IMX219 | 3x RGB CSI 160 deg FOV wide angle lenses Cameras providing side and back view 21 FPS to 120 FPS |
| On-Board Sensors | 2x 6-DOF IMU (gyroscope and accelerometer) |
| 1x Optical Flow sensor | |
| 1x ToF height sensor | |
| Connectivity | WiFi 802.11a/b/g/n/ac 867Mbps with dual antennas |
| 1x Micro HDMI port for external monitor support |
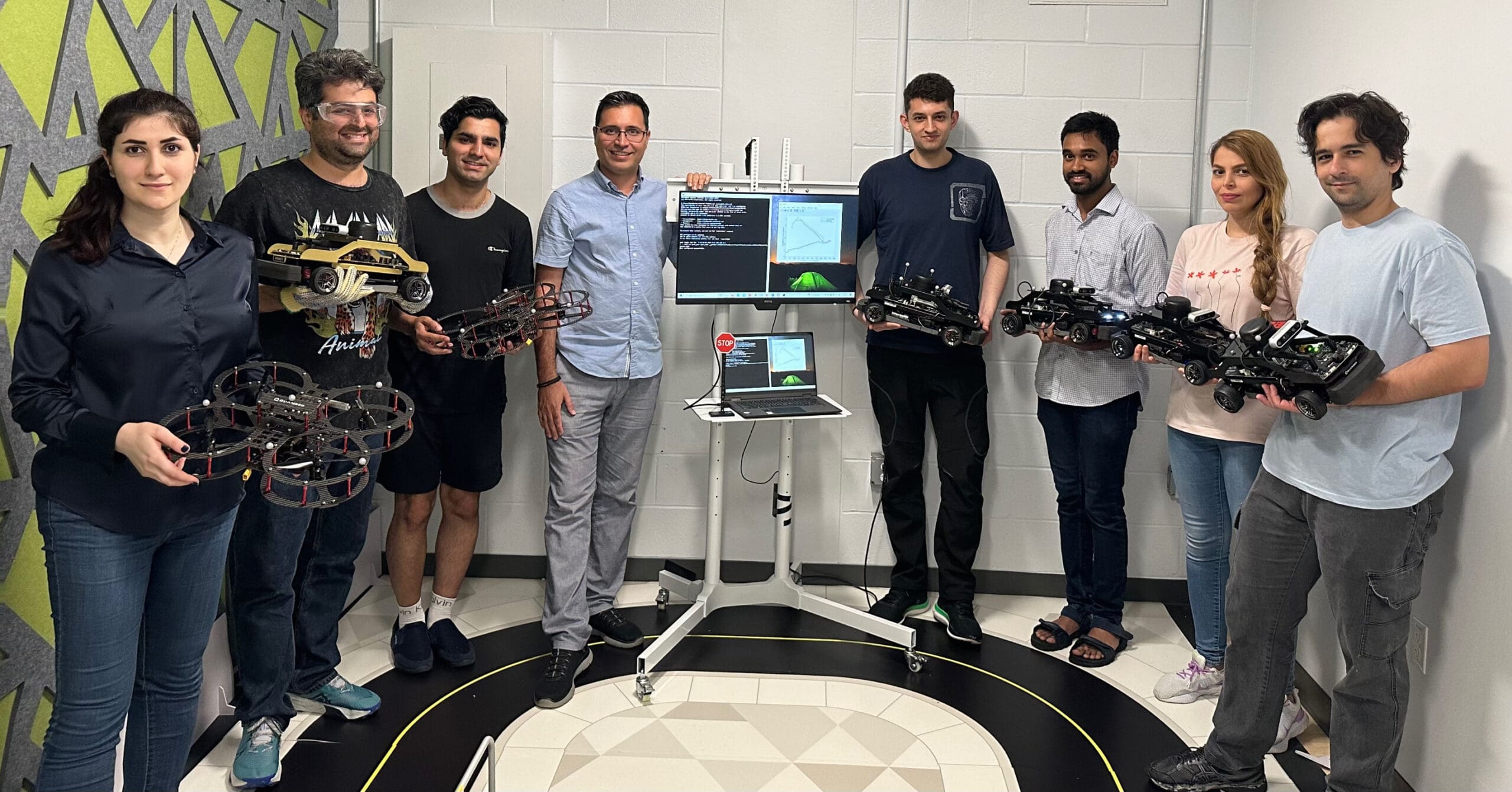
Research Studio
The Autonomous Vehicles Research Studio comes with everything you need to jumpstart your research.
Vehicles
- QDrone 2
- QBot Platform (Optional)
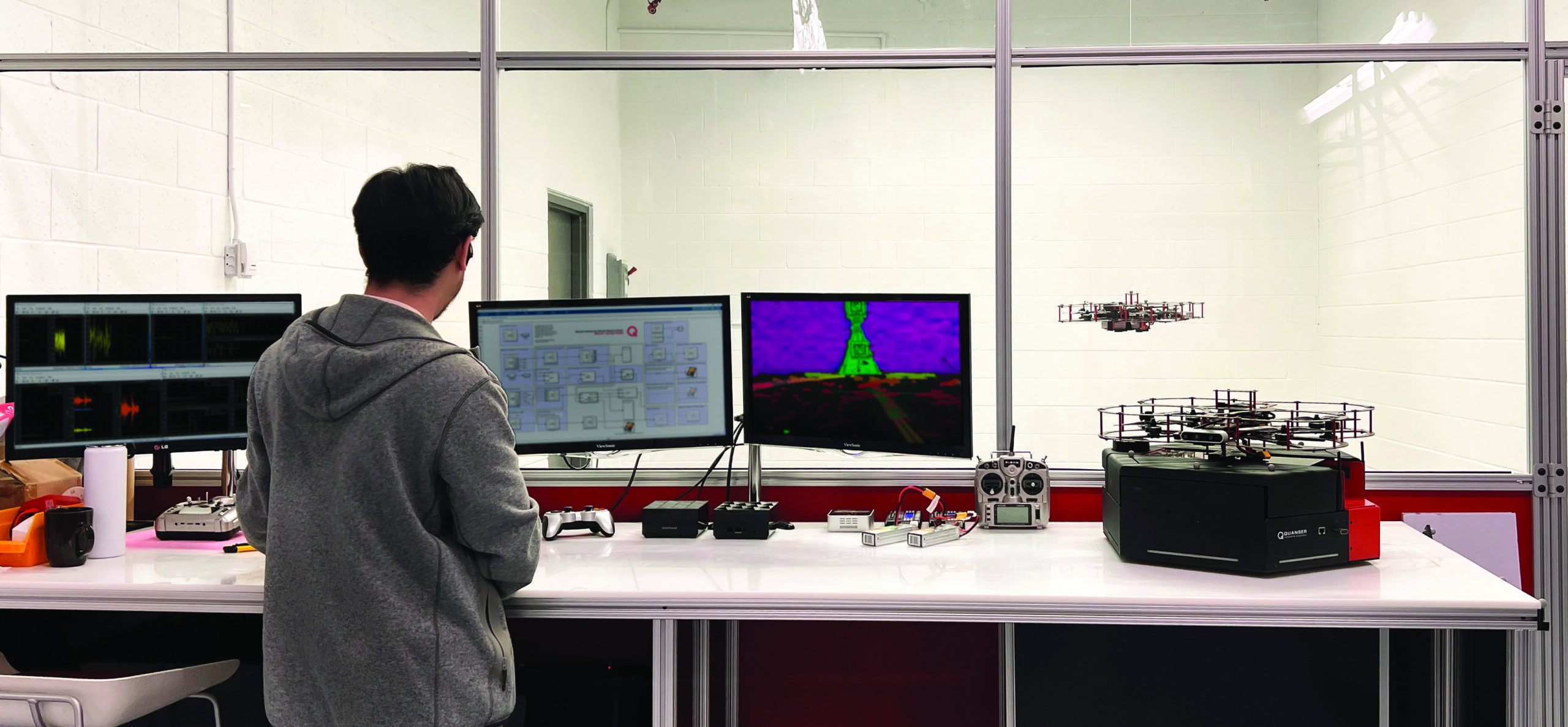
Control Ground Station
- High-performance computer:
Intel® Core i7
NVIDIA RTX Graphics card
32 GB DDR4 RAM
- 3 monitors
- USB flight controller joystick
- High performance router
Studio Equipment
- Natural Point Optitrack Flex 13
- Battery chargers
- Protective net
- Protective floor tiles
Group Citation: Aerospace
Explore more: All Research Paper
Related Community Resources




Related Products
Drone Research Lab
A High-Performance Platform for Accelerating Drone Research.

Self-Driving Car Lab
A Complete Turnkey Ecosystem that Accelerates Research, Enhances Teaching, and Engages Students from Recruitment through Graduation.

QBot 3
THIS PRODUCT IS NO LONGER AVAILABLE.

