Professor Sidney Givigi’s academic and research career is closely intertwined with Quanser’s innovative technology. During his PhD studies at Carleton University, in Canada he first utilized Quanser’s Rotary Inverted Pendulum for teaching control systems. As he moved to the Royal Military College, his focus expanded to include robotics; Quanser’s platforms like the Hexapod and QBall allowed him to delve into complex robotic systems and multi-agent communication.
Now, as a professor at Queen’s University School of Computing, he leads the Queen’s Autonomous Robotics Research Group (QUARRG Lab)—a dynamic team of 18 researchers pushing the boundaries of autonomous systems and applied AI. By incorporating Quanser’s Self-Driving Car Studio and Autonomous Vehicle Research Studio into his state-of-the-art lab, he continues to advance industry-level innovative research.
Throughout this journey, spanning nearly 20 years, Quanser’s equipment has been a constant in his labs. Quanser has closely accompanied him through his transition across disciplines—from control systems to robotics, and now to cutting-edge AI research. Quanser’s academic-centric approach allows us to respond to the evolving needs of academic partners, enabling them to stay at the forefront of technological trends, secure significant grants, and forge industrial partnerships.
I encourage you to join me in learning more about his experience.
Challenge
For a researcher whose work spans artificial intelligence, machine learning (particularly reinforcement learning and deep learning), autonomous vehicles, and robotics, access to a robust, versatile, and open platform suitable for innovative, industry-level research is essential. The breadth of research projects and partnerships demands a platform that can seamlessly integrate with an extensive lab infrastructure and communicate with a wide range of products. Additionally, addressing new engineering challenges requires solutions that are compatible with multiple development environments such as Python and Simulink, support ROS nodes, and enable applied AI through high computational power. “Lab solutions with relevant interfaces allow the research team to concentrate on advancing their core research objectives without the burdens of developing underlying software and hardware technologies.” Dr Givigi added.
Solution
When it comes to autonomous systems and robotics, there’s an ongoing debate between centralized computing (like cloud computing) and decentralized computing (edge computing). Neither paradigm has fully dominated the field, and companies like NVIDIA anticipate that a hybrid model will be the trend. Centralized computation offers cost-effective scalability by utilizing low-cost agents that rely on a central computational brain, facilitating collective intelligence tasks. However, concerns about real-time performance, reliable communication, and latency remain significant. Conversely, decentralized computation focuses on high-performance agents equipped with substantial on-board computational power and advanced sensor suites, enabling them to operate independently.
Recognizing this need, we at Quanser have taken a hybrid approach in developing the Self-Driving Car Studio and Autonomous Vehicle Research Studio. These solutions incorporate intelligent, high-performance agents capable of communicating with centralized and scalable ground stations, offering researchers a hybrid model that addresses a wide range of applications. Additionally, to leverage the advantages of low-cost, scalable solutions—which are often open-source with less computation power Quanser’s communication APIs and software-agnostic platforms enable seamless integration with various lab solutions, catering to diverse research needs.
Covering All Aspects of Autonomous Systems and Applied AI
Professor Givigi’s lab exemplifies a holistic setup:
 Complete Testbed for Autonomous Systems and Applied AI
Complete Testbed for Autonomous Systems and Applied AI
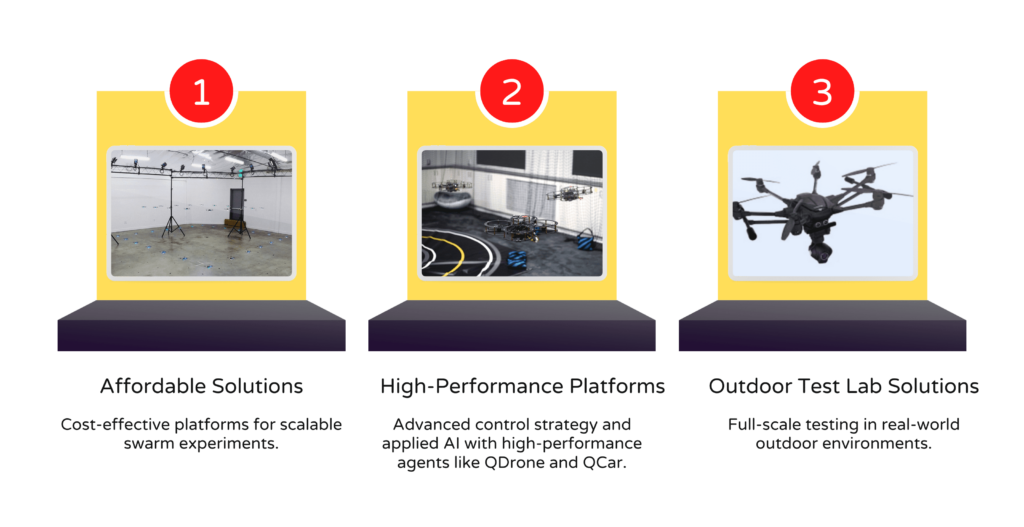
- Affordable Solutions: For large-scale deployments where collective intelligence and scalability are essential, the lab utilizes cost-effective and customizable platforms. Products like the Crazyflie drones enable experimentation with swarm behaviors in a scalable manner, suitable for testing scenarios that require numerous agents with less
- High-Performance Platforms: When complex control strategies and advanced AI applications demand substantial on-board computational resources, the lab employs high-performance solutions such as the QDrone and QCar.
- Outdoor Test Lab Solutions: To validate research in real-world environments, the lab also utilizes outdoor test beds, allowing for deployment and testing at full scale.
This strategic combination allows the lab to address a wide array of research questions—from fundamental studies of collective behavior to sophisticated AI algorithm implementation in autonomous vehicles. This comprehensive progression helps the lab secure successful funding, grants, and industrial collaborations by demonstrating the capability to address a wide spectrum of research challenges.
Solution in Action
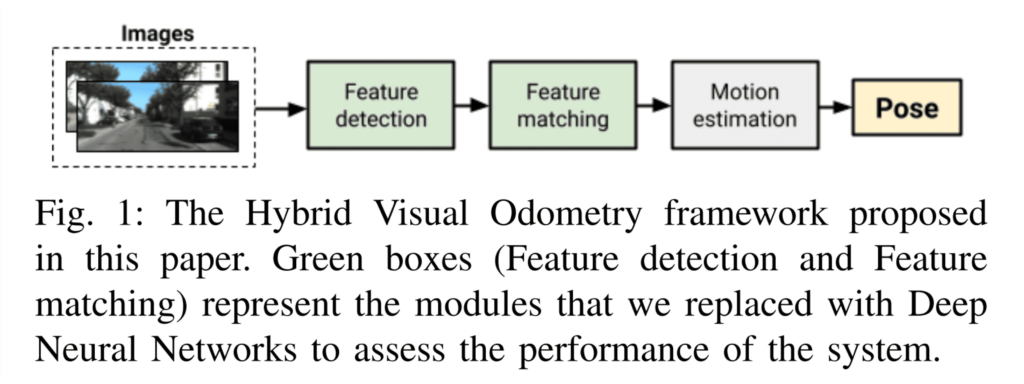 Hybrid Visual Odometry framework integrates deep learning with classical methods for enhanced performance.
Hybrid Visual Odometry framework integrates deep learning with classical methods for enhanced performance.
Let’s look at one specific case where the QCar significantly aided industry-level research. Supported by industry partners like Motorola and Eldorado, Professor Givigi’s team at Queen’s University used the QCar to develop a hybrid visual odometry framework for challenging environments. This framework blends deep neural networks with classical methods—a complex task requiring precise data collection and advanced computation.
Generating the right dataset was a big part of this research. Existing datasets didn’t cover the specific and challenging scenarios they needed. The QCar’s compact size, precise motion control, and stable dynamics made it ideal for efficiently collecting high-quality data. Professor Givigi believes it was quite efficient, especially since the team has experience in dataset generation on full-scale cars. Access the dataset here.
It’s important to highlight that QCar’s rich sensor suite and the ability to modify sensor inputs allowed Prof. Givigi’s team to emulate various camera failures, such as overexposure and underexposure. This was crucial for testing the robustness of their algorithms.
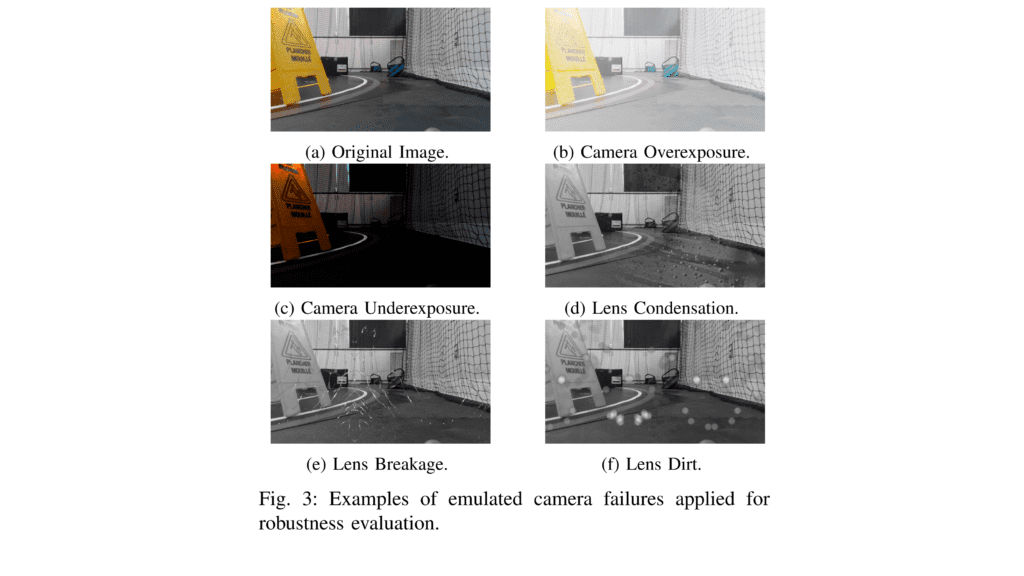
Emulated camera failures, like overexposure and lens dirt, tested algorithm robustness in real-world scenarios
Professor Givigi emphasizes the importance of combining control systems with computer science in real-time applications to enhance research outcomes. The QCar facilitated this integration, allowing his team to move beyond simulations and apply their algorithms practically. Their research demonstrated that combining Superpoint for feature detection and Lightglue for feature matching with classical methods significantly enhances the accuracy and robustness of visual odometry systems in challenging scenarios.
Result
I believe our 20-year partnership from Carlton to Queens University highlights Quanser’s reliability and trustworthiness as Professor Givig’s partner throughout this journey. This long-term collaboration is a significant achievement for Quanser. Additionally, we can highlight some of their remarkable accomplishments:
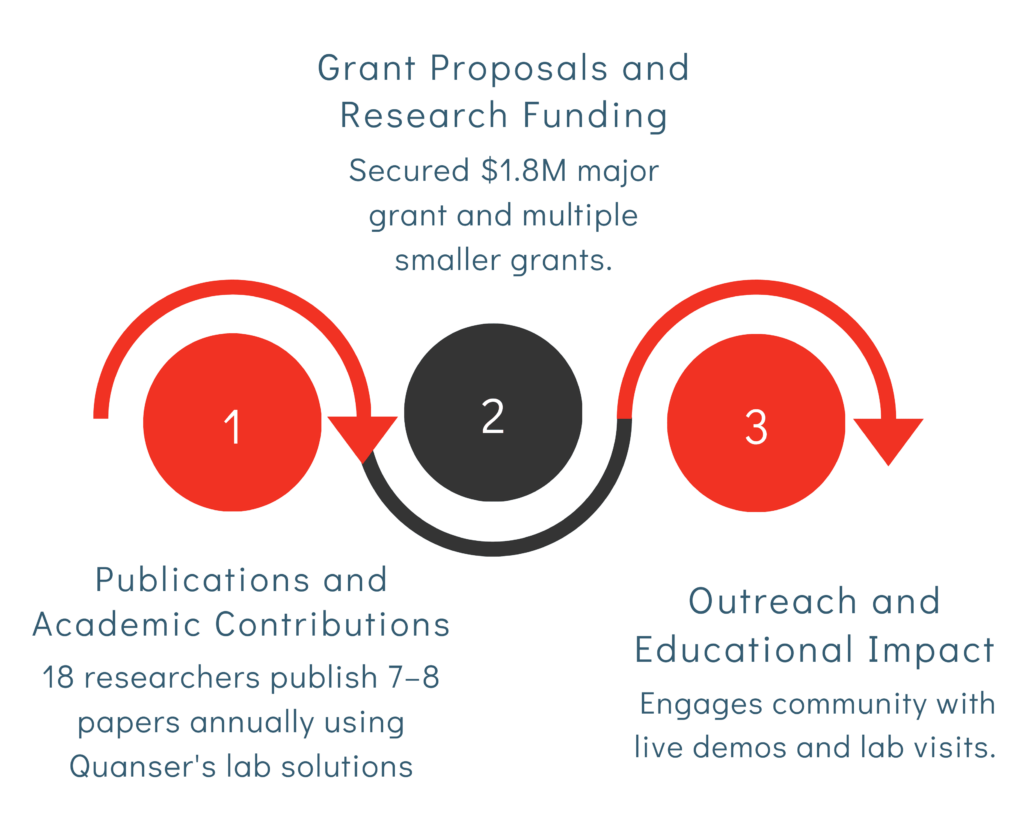
Publications and Academic Contributions
Professor Givig’s research lab comprises 18 dedicated researchers, including postdoctoral fellows, PhD candidates, and master’s students. Each year, they publish 7 to 8 papers just using QCar and QDrone.
Grant Proposals and Research Funding
Professor Givig has successfully secured substantial grants, including a major $1.8 million grant, along with several projects ranging from $200,000 to $300,000. These funds have been obtained through collaborations with industry and government partners.
Outreach and Educational Impact
Quanser products play a pivotal role in engaging the community. Schools, students, and industry partners regularly visit the lab to witness live demonstrations. The interactive experience with real, dynamic systems makes the QUARRG Lab one of the most popular destinations in the School of Computing.
 Outcomes: Research funding, publications, and community engagement
Outcomes: Research funding, publications, and community engagement
Conclusion
Over the past two decades, the partnership between Professor Sidney Givigi and Quanser has exemplified the power of adaptable and reliable technology in driving groundbreaking research. From control systems to robotics and applied AI, Quanser’s versatile, open-architecture platforms have been instrumental in advancing both academic innovation and practical applications. This collaboration has not only led to significant academic contributions and substantial research funding but has also fostered community engagement and industry partnerships.
If you’re an educator or researcher looking to elevate your work in these fields, Quanser’s comprehensive solutions can empower your lab to secure more funding, drive innovative research, and build valuable partnerships.
Feel free to connect with me, Morteza Mohammadi, at Morteza.Mohammadi@Quanser.com, to explore how we can support your journey.