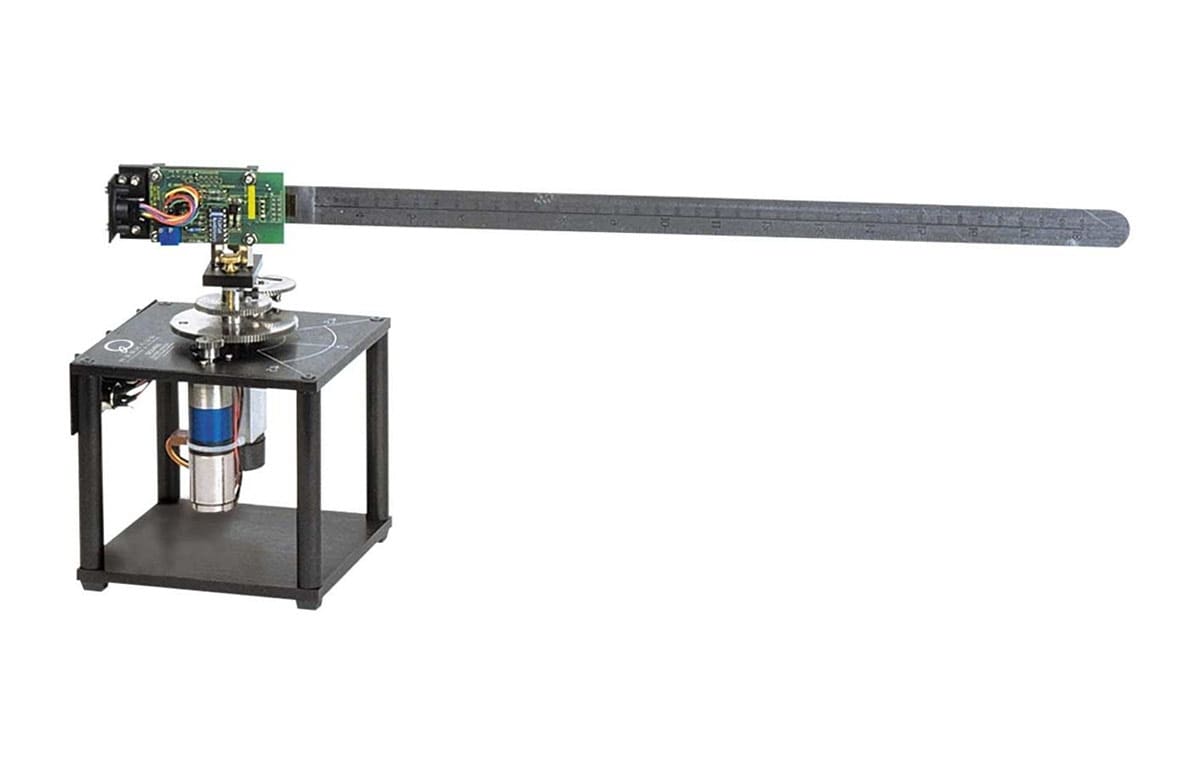
Rotary Inverted Pendulum

A classic modeling and control systems experiment
The Rotary Inverted Pendulum module attaches to the Rotary Servo Base Unit, expanding the mechatronics and controls topics that can be taught. The pendulum module challenges students to not only model and control a pendulum, but also to learn about hybrid control systems by tuning a swing-up control system. In addition to teaching intermediate control concepts, the Rotary Inverted Pendulum can be used for research in various areas, including fuzzy control.

Gallery


Product Details
Students can use this module to learn practical problem-solving skills for mechanical and aerospace engineering. A classic application context for the design challenge is the two-wheeled Segway self-balancing electric vehicle.
| Rotary Arm Length | 21.6 cm |
| Rotary Arm Mass | 0.257 kg |
| Pendulum Length | 33.7 cm |
| Pendulum Mass | 0.127 kg |
| Encoder Resolution | 4096 cocunt/rev |
Modeling Topics
- State-space representation
- Linearization
Control Topics
- Hybrid control
- Pole placement
- Energy-based/non-linear control
The following additional components are required to complete your workstation, and are sold separately:
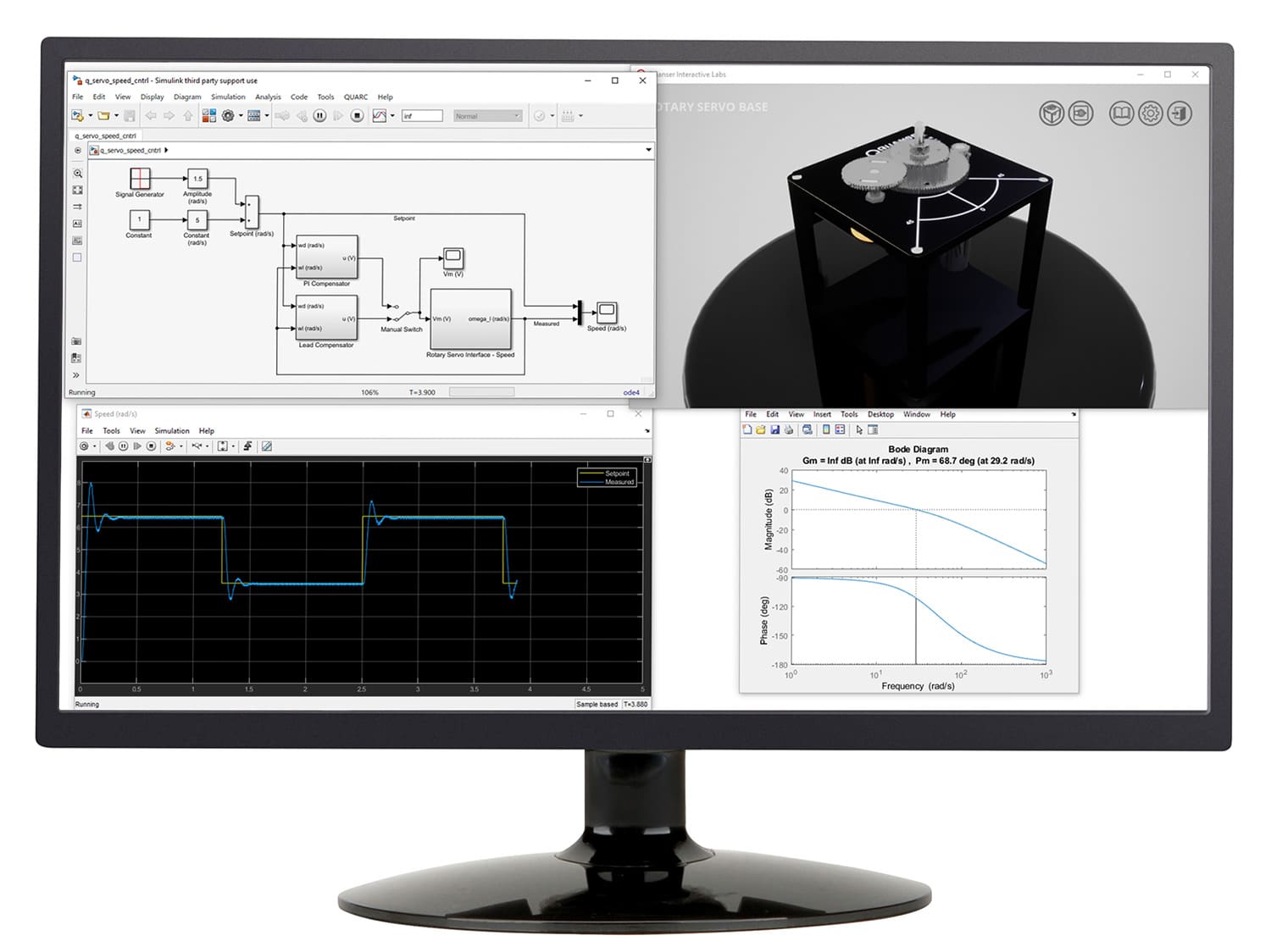
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Rotary Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Rotary Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with Quanser Q1-cRIO
- NI myRIO with Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
Group Citation: Fundamental Control
Explore more: All Research Paper


Related Products

Rotary Double Inverted Pendulum
Take the classic inverted pendulum challenge to the next level

Rotary Flexible Joint
Modeling flexible joints in robotic arms
Rotary Flexible Link
Control and vibration analysis of flexible links

Rotary Servo Base Unit
Foundational modular control experiment