QLabs Virtual Rotary Servo

Virtual platform for distance and blended undergraduate control systems courses
QLabs Virtual Rotary Servo is a fully instrumented, dynamically accurate digital twin of a classic Rotary Servo Base Unit system. It behaves in the same way as the physical hardware and can be measured and controlled using MATLAB®/Simulink® and other development environments. With QLabs Virtual Rotary Servo, you can enrich your lectures and activities in traditional labs, or bring credible, authentic model-based lab experiences into your distance and online control systems course.
QLabs Virtual Rotary Servo is available as a 12-month, multi-seat subscription. The platform is compatible with the physical Rotary Servo Base Unit curriculum, which covers modelling, position, and speed control topics.
Product Details
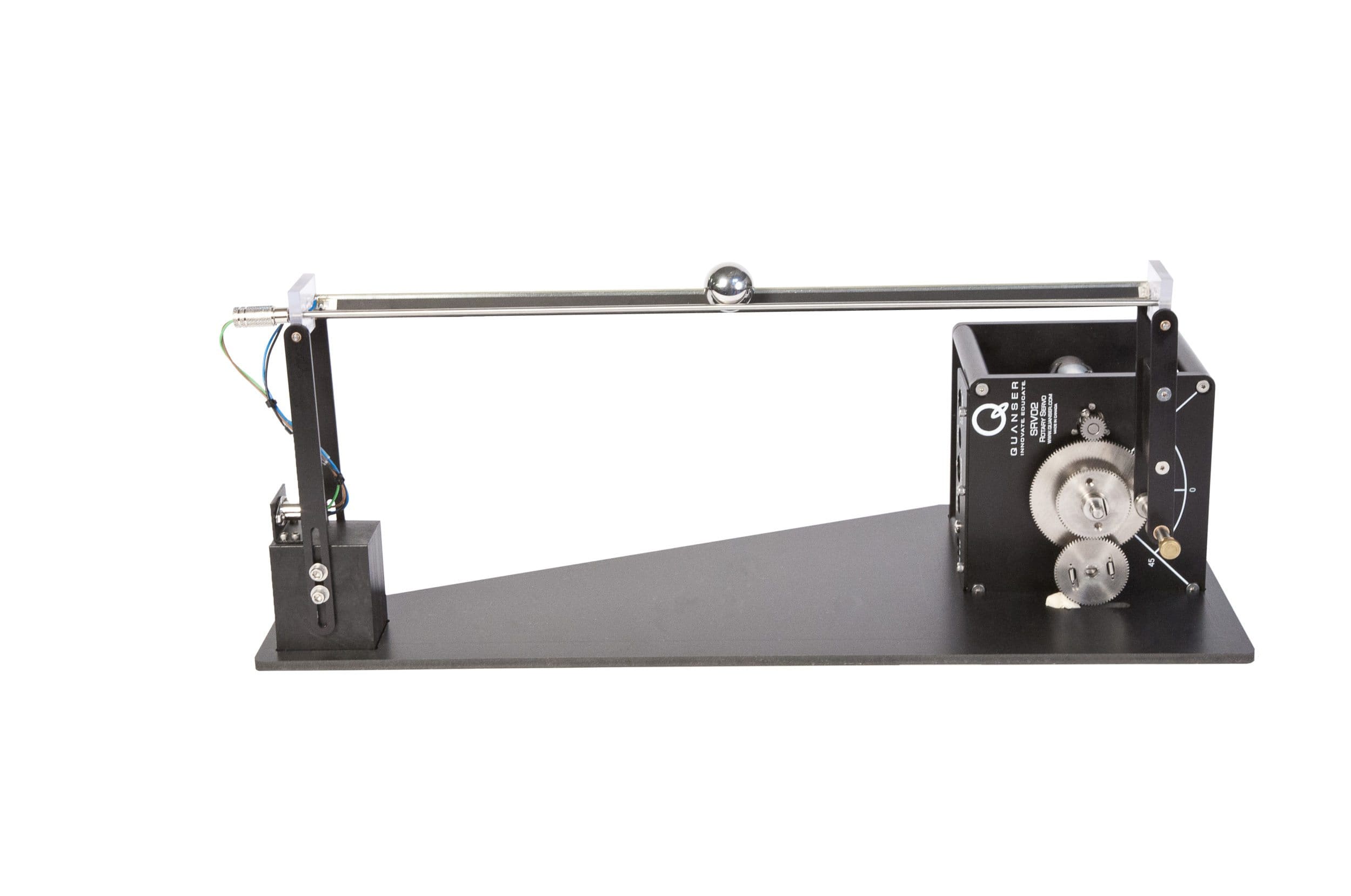
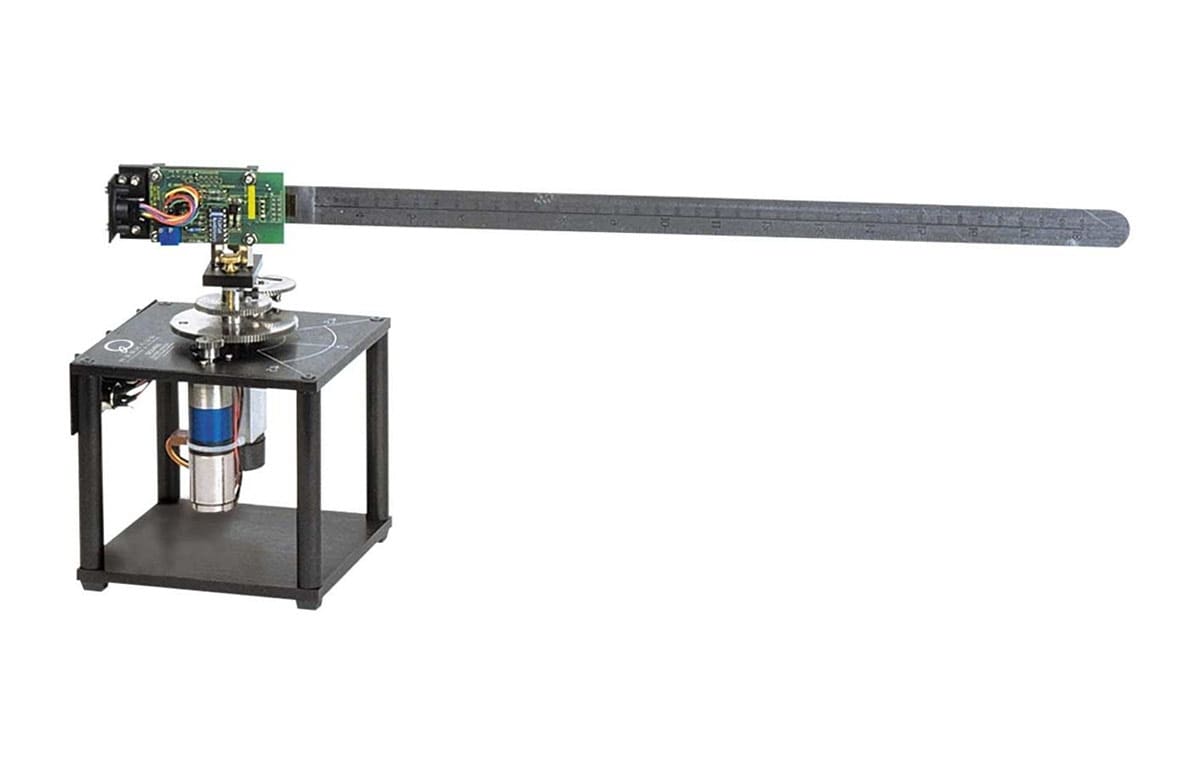
Same as the physical Rotary Servo Base Unit, the virtual system features a DC motor that drives a smaller pinion gear. This gear is fixed to a larger middle gear that rotates on the load shaft. The position of the load shaft is measured using a high-resolution optical encoder or a potentiometer.
- High-fidelity, credible lab experiences equivalent to use of physical lab equipment
- 12-month, multi-seat subscription
- Full access to system parameters through MATLAB®/Simulink®
- ABET-aligned curriculum
| App Download & Access to Subscription | Quanser Academic Portal |
| App OS Compatibility | Microsoft Windows 10 or Later |
| Required Software | Curriculum designed for MATLAB and Simulink R2022a or later, with Python 3 compatibility |
| Minimum Specifications | Intel Core Ultra 5, Intel Core i5, Ryzen 5 |
| 8GB RAM | |
| Intel UHD, or Iris Xe integrated GPU | |
| Recommended Specifications | Intel Core Ultra 7, Intel Core i7, Ryzen 7 |
| 16GB RAM | |
| Intel Iris Xe or Arc integrated GPU |
Modeling Topics
- First-principles derivation
- Experimental derivation
- Transfer function representation
- Frequency response representation
- Model validation
Control Topics
- PID
- Lead Compensator
- Steady-state error
Group Citation: Software
Explore more: All Research Paper
Related Products

Qube-Servo 2
THIS PRODUCT IS NO LONGER AVAILABLE.

QLabs Controls
Credible lab activities accessible off-campus

Rotary Servo Base Unit
Foundational modular control experiment

Rotary Inverted Pendulum
A classic modeling and control systems experiment

Rotary Double Inverted Pendulum
Take the classic inverted pendulum challenge to the next level
Rotary Flexible Link
Control and vibration analysis of flexible links

Rotary Flexible Joint
Modeling flexible joints in robotic arms