Aalborg University in Esbjerg is located in the heart of the bustling wind turbine industry, with the offshore wind farms visible from the campus and a nearby harbor being one of the largest wind turbines export hubs.
Denmark is one of the global leaders in green energy use. In 2018, almost 41% of all energy supply in the country was generated by wind turbines. But with the growing number of wind turbine installations, there is also an increasing need for their inspection and maintenance. Currently done mostly manually, this can be fairly expensive, and, surprisingly, quite polluting. The research team at the Aalborg University, led by Dr. Petar Durdevic, thinks automation could help do the job faster, with lower cost, higher precision, and removing people from dangerous environments.
Challenge
Developing Technology Scalable for Practical Applications
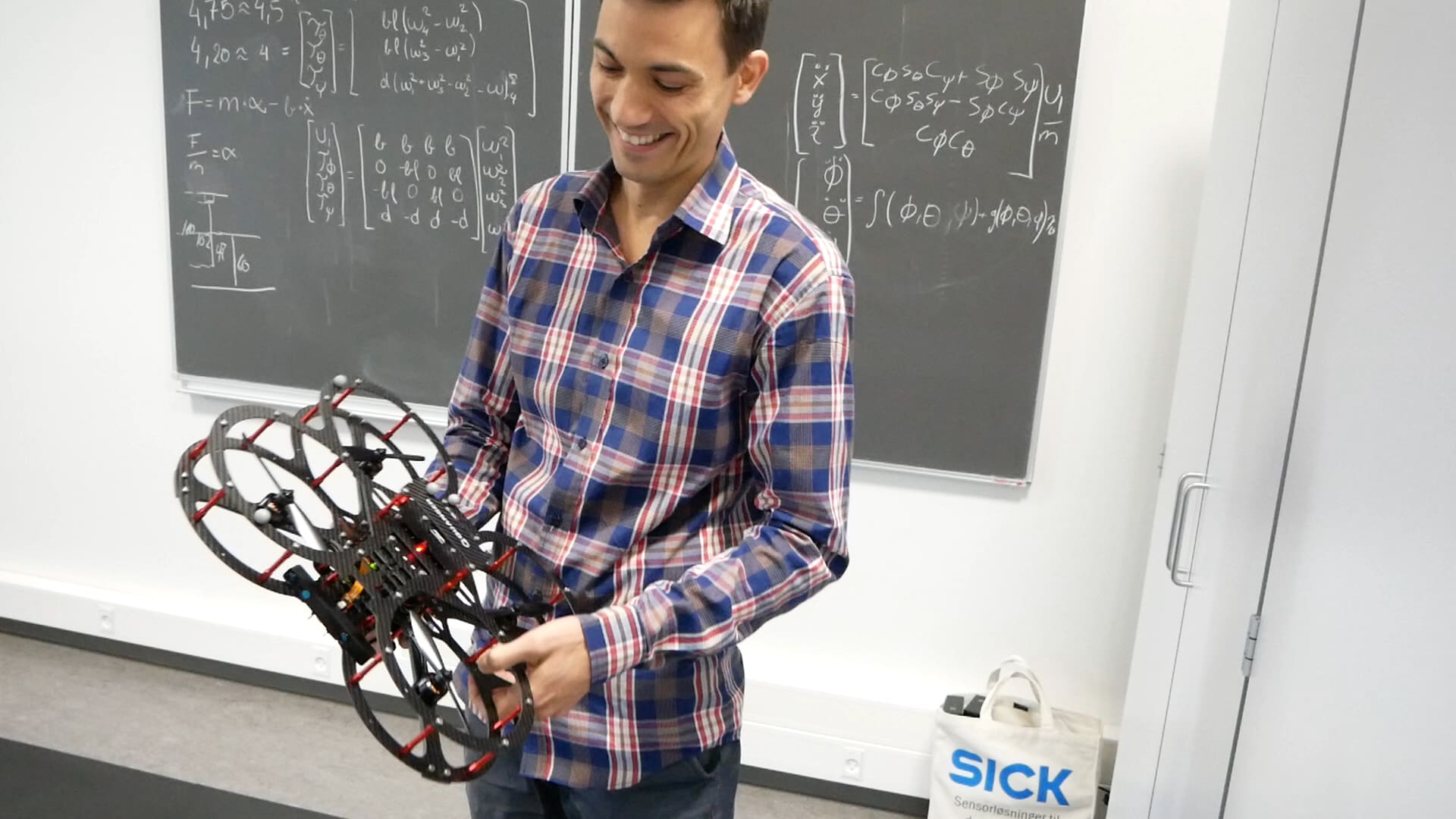
“I believe drones will become a big part of our future. Especially when it comes to activities like wind turbine inspections, drones can perform a lot of tasks humans cannot,” says Dr. Durdevic. His goal is to design drones that have a full perception of the environment and could fulfill wind turbine inspections autonomously, without a need for human input. Working with the local industry, Dr. Durdevic and his team also want their technology to be scalable for practical applications so that it could be directly employed in the industry.
To get to these goals, they needed a system allowing them to test their ideas in the safety of their lab and quickly develop a proof of concept.
Solution
Smart, Flexible System Allows to Focus on Core Research
They chose the Quanser Autonomous Vehicle Research Studio, with its QDrone quadrotors and QBot ground robots. “It’s a very smart system and gives us a lot of flexibility,” says Dr. Durdevic. “We did not have to do any hardware development. Instead, we could focus on our theoretical research. Using the QDrone, we could quickly implement some of our advanced techniques, test them, and validate them.”
As a first step, the team started looking at how to navigate in the environment, combining classical control with vision-based methods. The task at this stage was to recognize a wind turbine visually and then autonomously navigate towards it without using GPS.
For their initial work, the team used the Quanser-developed controllers. “We wanted to get acquainted with the system while focusing on this crazy idea to use deep neural networks to compute the inputs to our attitude and position controllers,” says Dr. Durdevic. “It worked very well for us,” he continues. With all computing done in Matlab/Simulink, learning to work with the Autonomous Vehicles Research Studio was rather intuitive for the team as they are accustomed to the same tools from other teaching and research activities.
As the team got more familiar with the system, they expanded on the idea of using neural networks, this time using the method for visual servoing, to be able to navigate in an off-shore environment, find a wind turbine, navigate towards it, and use vision for inspection.
They developed an algorithm segmenting the visual input from the camera, then processing the segments using a neural network trained to find the wind turbine, and calculating the drone’s relative position to the wind turbine. Once the drone identifies the wind turbine, it uses the visual input for both collision avoidance and yaw control as it moves towards it.
Again, having the QDrones was extremely useful. “We were really happy that we had the Quanser system,” says Dr. Durdevic. “Testing our approach and running neural networks required a lot of the resources from the GPU, but everything worked very well.”
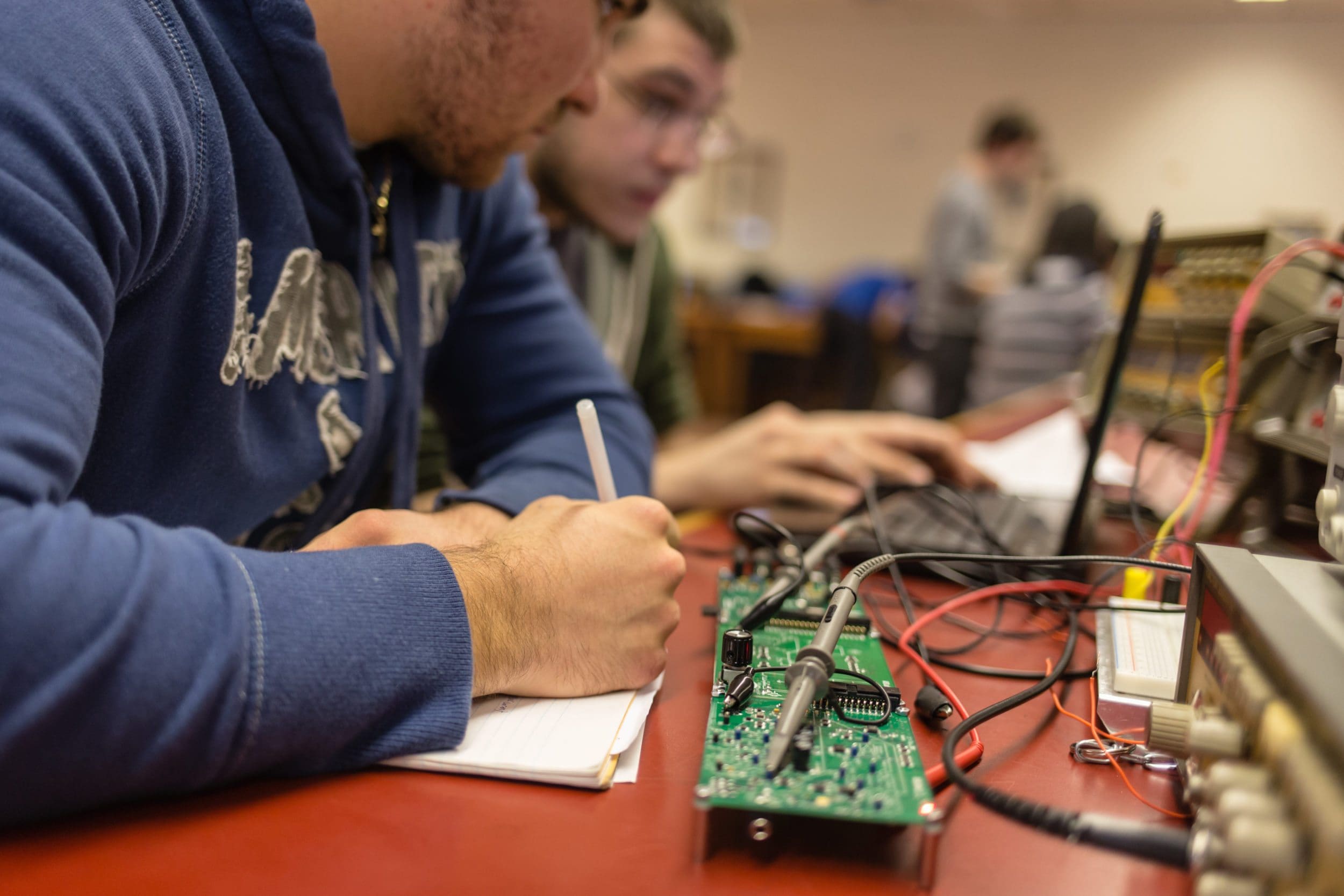
The other reason the team at Aalborg University chose the Quanser autonomous vehicles platform was achieving their teaching objectives. “The university embraces a problem- and project-based learning,” notes Dr. Durdevic. That means Aalborg students spend 50% of their time working on projects. “We want to give students good projects that motivate them and teach them useful skills, continues Dr. Durdevic. “We chose to invest in the Quanser system because we didn’t have to spend time on soldering and pulling wires ourselves. Our focus is on developing control algorithm and AI, not building drones.”
Result
From an Idea to a Research Paper in Three Months
Saving time on developing their own autonomous vehicle platform or implementing hobby-level vehicles, the team at Aalborg University could focus on their research on day one. No wonder they submitted their first research paper only three months after the Autonomous Vehicles Research Studio installation and presented it at the 10th IFAC International Symposium on Intelligent Autonomous Vehicles in 2019.
And the students enjoy working with drones too. One of the projects involved designing an optimal controller that included motor thrust dynamics as states. The rumor goes the controller is even better than the Quanser example.