Over the last almost 30 years, the Rotary Servo (SRV02) system, with all its add-on modules, was and still is very popular. But we knew there was also a demand for a more compact, integrated solution to teach control systems courses at the undergraduate level. We responded to that demand with the development of the QUBE-Servo plant. The fully integrated servo system still adheres to the open-architecture philosophy of Quanser, and at the same time allowed us to modernize the curriculum and the way it is delivered – in the form of shorter, self-contained, modular labs that allowed instructors to design their own course path through the studied concepts, and gave them much more flexibility.
Since the release of QUBE-Servo, we not only updated the hardware to the current QUBE-Servo 2 version (you can easily recognize it by the LED strip at the top), but with input and collaboration from many professors at institutions around the world, we kept improving the curriculum, expanding the existing topics, and adding new ones. Now, eight years down the road, we are on the verge of releasing the major curriculum update, more than doubling the original 14 lab exercises. And before I delve into the details of the new additions, let’s look at how you helped us get to this point.
QUBE-Servo Timeline
 The curriculum topics we chose for the first release of QUBE-Servo in 2013 were based on the popular textbook, Control Systems Engineering by Prof. Norman Nise, and influenced by the syllabi from controls courses at institutions such as Anna University and University of Kerala, India. Unlike the curriculum designed previously for other Quanser systems, the QUBE-Servo material featured shorter, more self-contained labs, course design guides, and textbook mapping aligning the sections of the curriculum to specific chapters of the most popular engineering textbooks. We also made the materials more “open” by including LaTeX sources and Word files, allowing instructors to integrate this content into their courses more easily. All this was based on feedback from existing Quanser users.
The curriculum topics we chose for the first release of QUBE-Servo in 2013 were based on the popular textbook, Control Systems Engineering by Prof. Norman Nise, and influenced by the syllabi from controls courses at institutions such as Anna University and University of Kerala, India. Unlike the curriculum designed previously for other Quanser systems, the QUBE-Servo material featured shorter, more self-contained labs, course design guides, and textbook mapping aligning the sections of the curriculum to specific chapters of the most popular engineering textbooks. We also made the materials more “open” by including LaTeX sources and Word files, allowing instructors to integrate this content into their courses more easily. All this was based on feedback from existing Quanser users.
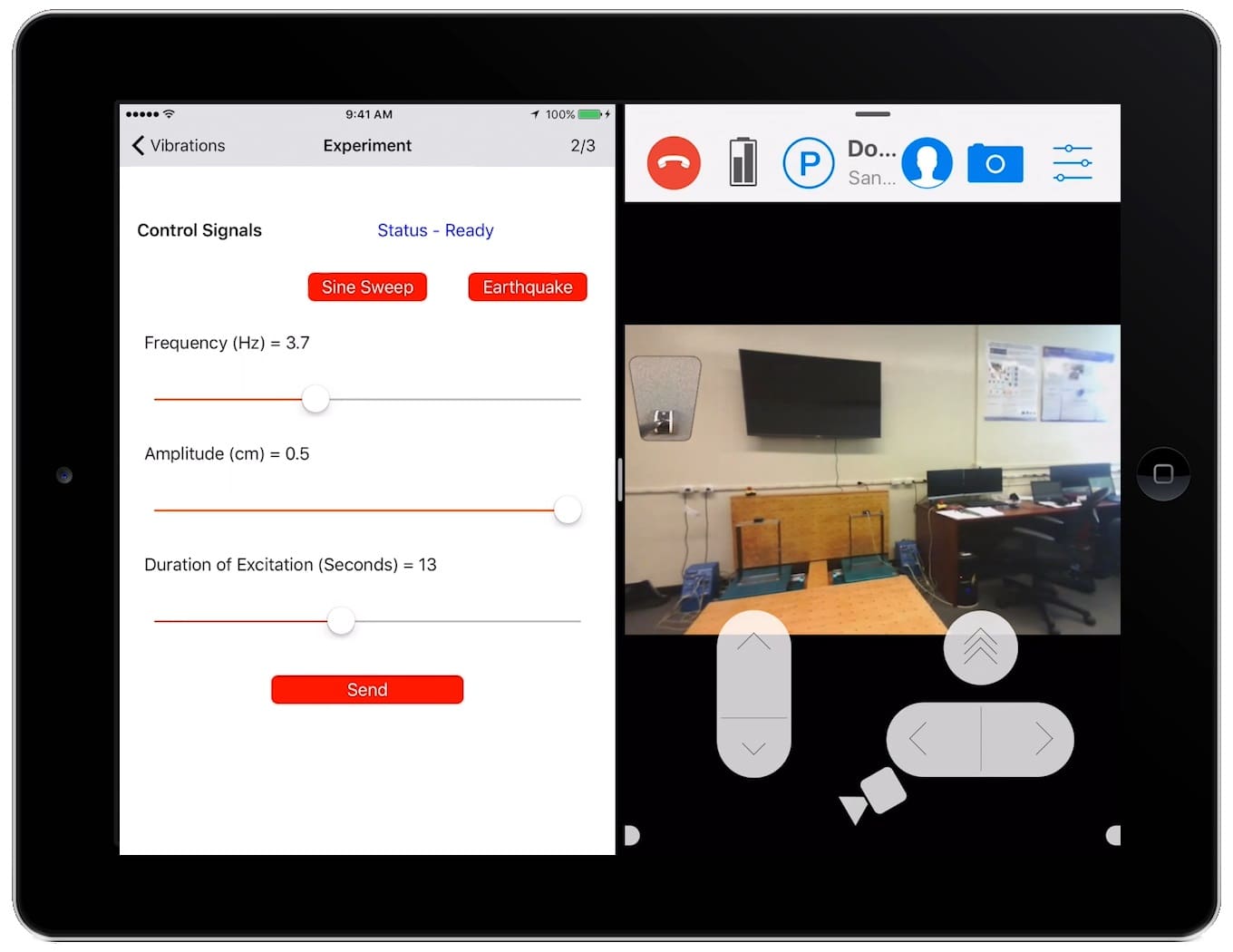
The first addition to the original 14 labs included in the curriculum was truly immersive. We adapted the Quanser Driving Simulator, an application lab developed in collaboration with Prof. Ridha Ben Mrad from the University of Toronto for his Control Systems course, from the use of Quanser Rotary Servo to QUBE-Servo. The Driving Simulator lab leveraged the visualization capabilities of our QUARC real-time control software, engaging students through immersive, gaming-like experience.
About a year later, Quanser was approached by instructors from Lawrence Technological University. To adjust the curriculum to the needs of their course, we created additional labs, including Frequency Response Modelling and Steady-State Error.
The next addition took us to the world of digital control. In 2014, Prof. Keyvan Hastrudi-Zaad from Queen’s University in Kingston, ON, approached us for help developing his course on Modelling and Computer Control of Mechatronic Systems. While his lab used the Rotary Servo systems, in 2015 we ported the content into the lab exercises using QUBE-Servo.
In 2016 we released the QUBE-Servo 2, a new version of the plant that included a modern and flexible QFLEX 2 interface, current and speed sensors, and stall detection. We also added two new labs to the core curriculum: State-space Modelling lab for the Inverted Pendulum module and a Lead Compensator lab for the DC motor.
Over the years, we keep adding new systems, but there are also times when we have to say “good-bye” to some of the older systems. That happened to our QET DC Motor Control Trainer. Many users that adopted the QUBE-Servo requested that some of the labs from the QET courseware, which was developed in collaboration with the controls legend Prof. Karl J. Åström, be adapted to the QUBE-Servo. In response, we added the Parameter Estimation modeling lab and the Load Disturbance Rejection and Robustness Parameter Sensitivity control labs.
As our QUBE-Servo customer base grew, we wanted to map the curriculum to textbooks used in other regions of the world. Adding DC Motor State-Space Modelling and Pendulum Pole-Placement State-Feedback Control labs helped us match the course materials with the content presented in the Automatic Control Theory by Hu Shou Song, a textbook widely adopted in China. Professor Zhao from Tsinghua University was one of the first users of this material, and his feedback helped us improve it further.
The year 2019 marked our first ingression into the world of textbooks. And not just any textbook – our Experience Controls app adds dynamic simulations that make controls concepts much easier to visualize and understand. Inspired by the work on this mobile textbook, we created new Optimal Control labs for DC Motor as an introduction to modern control.
While some of the labs mentioned above were added to the core QUBE-Servo curriculum in the past, others existed as add-on materials. This year, we took the time to revise and update them all and make them a part of the resources available to every QUBE-Servo 2 user.
What’s Included in the New Curriculum
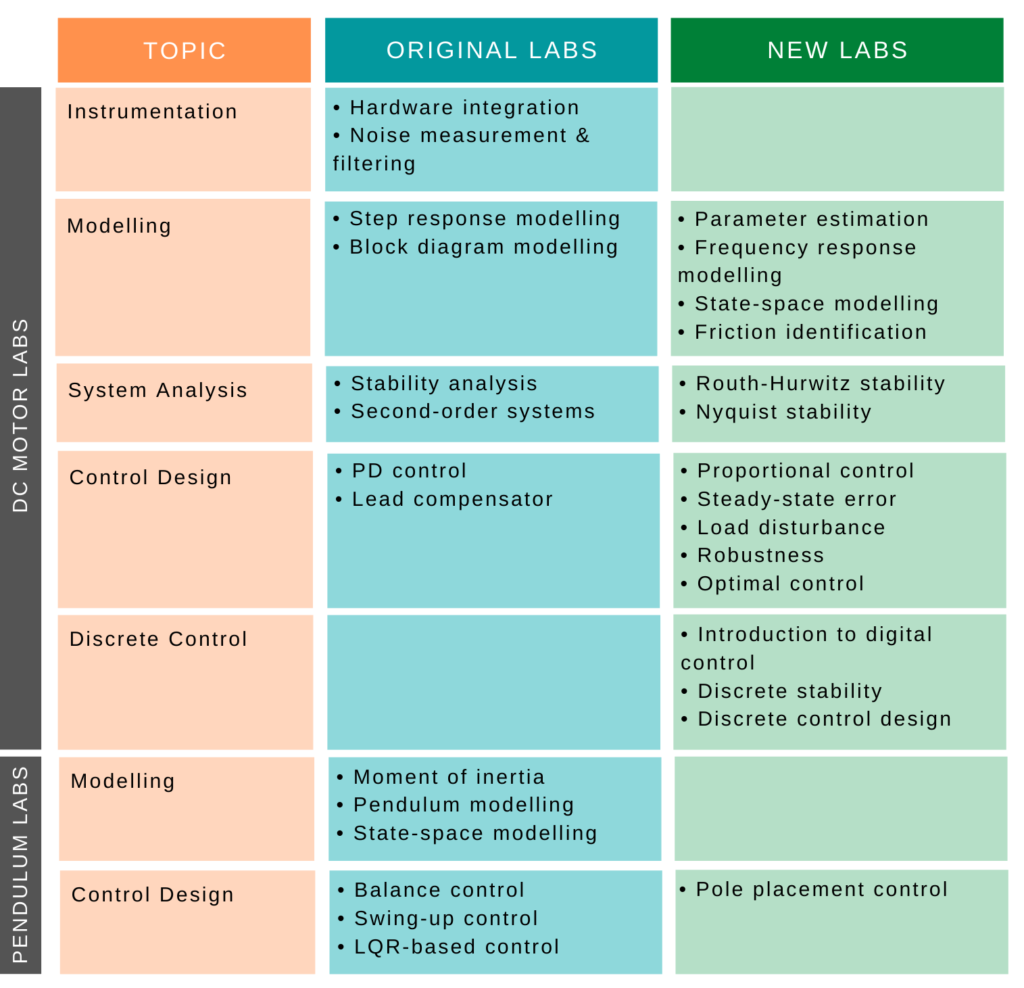
Building on the popularity of the modular curriculum for the QUBE-Servo 2, we have more than doubled the original 14 laboratory exercises. The updated curriculum now covers additional modelling topics such as parameter estimation, frequency response modelling, state-space modelling, and friction identification. We expanded the system/stability analysis labs to include the Routh-Hurwitz and Nyquist stability analysis methods. The control design has also been updated and now features load disturbance rejection, robustness sensitivity design, LQR optimal control experiments in addition to three new labs related to discrete control. The following table summarizes the additional new laboratory exercises:
In my next blog post, I will look closer at the instrumentation and modelling labs – stay tuned!