
Aero 2

Reconfigurable Dual-Rotor Aerospace Experiment for Controls Education and Research
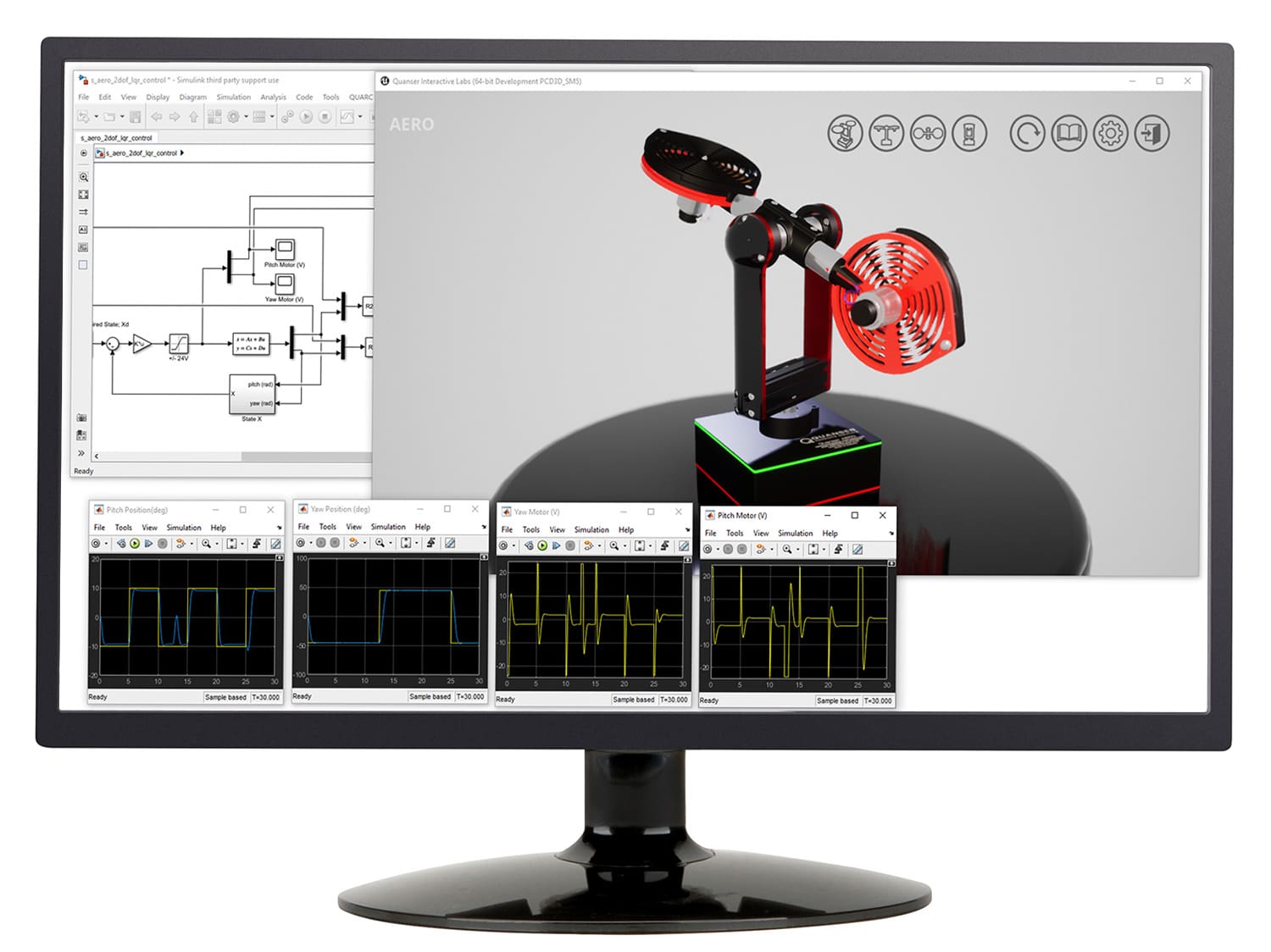
The Aero 2 allows you to teach and research more control systems courses and topics than any other solution on the market. Equipped with a collection of high-fidelity sensors, our traditional open-architecture software, and reconfigurable dynamic properties, the Aero 2 can be used to teach almost all undergraduate control systems topics and for a variety of research applications.





Product Details
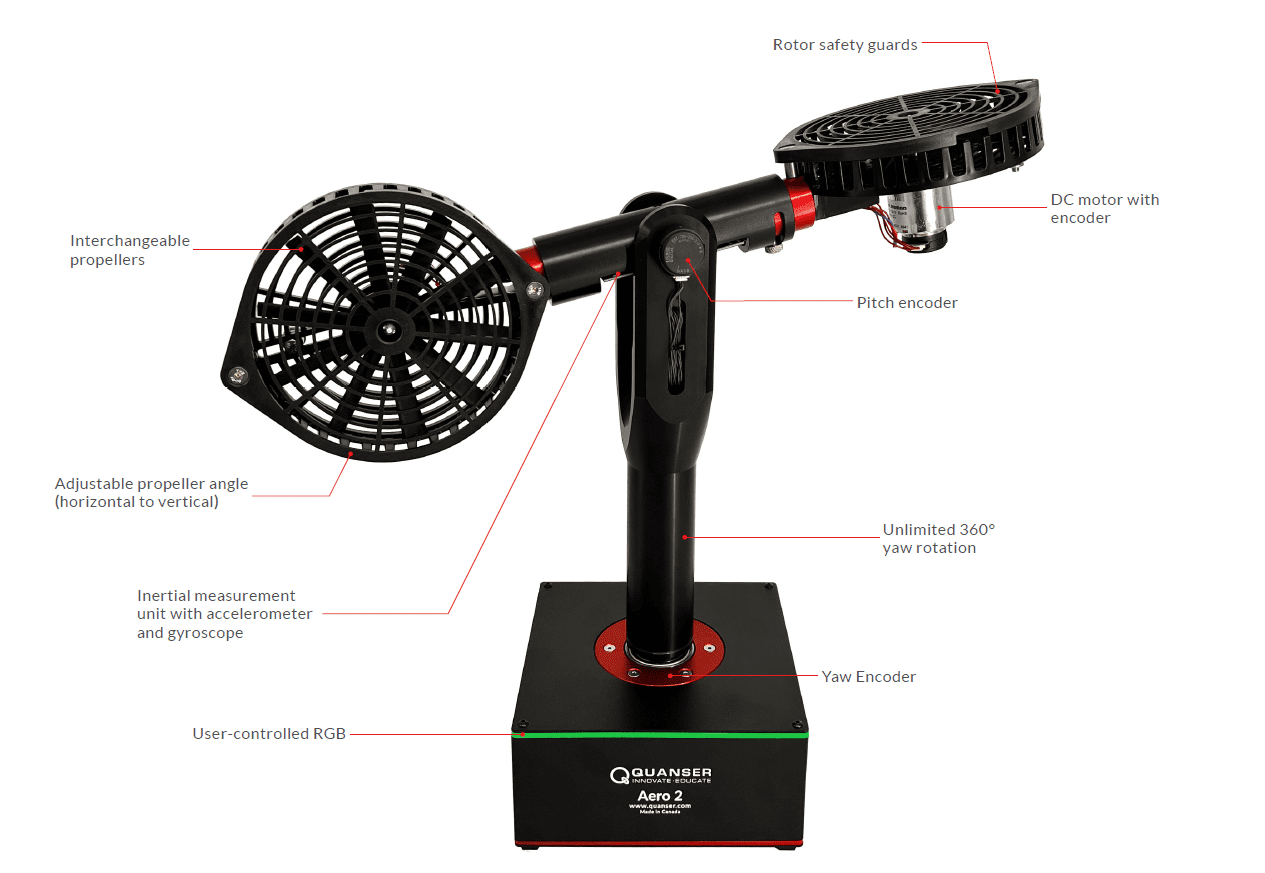
Two rotors provide thrust and allow users to safely control the device’s dynamic response. Interchangeable propellers, user-adjustable thrust vectors, and the ability to lock axes individually mean the Aero 2 is capable of abstracting a variety of aerospace systems, such as half-quadrotor, 1-DOF VTOL, and 2-DOF helicopter.
The compact base includes a built-in amplifier with an integrated current sensor, a built-in data acquisition device, and an interchangeable QFLEX 2 interface panel offering connectivity options for a wide range of devices including PCs, embedded computers, and microcontrollers. Four high-resolution optical encoders, plus one Inertial Measurement Unit (IMU), can be used to measure and control attitude in both pitch and yaw axes. Slip ring wiring allows for unlimited, continuous, 360° yaw rotation.
| Dimensions (D x W x H) | 18 cm x 52 cm x 40 cm |
| Operating Space (D x W x H) | 52 cm x 52 cm x 62 cm |
| Mass | 4.7 kgm |
| Pitch Angle Range | 90° (± 45° from horizontal) |
| Yaw Angle Range | 360º |
| Pitch Encoder Resolution | 2880 counts/revolution |
| Yaw Encoder Resolution | 4096 counts/revolution |
| Prop Thrust Constant | 5 x 10^-4 N-s/rad |
| Internal Thrust Constant | 0.042 Nm/A |
| Internal Measurement Unit (IMU) | IIM-42652 Compact 6-Axis MEMS Device |
| Tri-Axis Gyroscope Range | +- 500 dps |
| Tri-Axis Accelerometer Range | +-2g |
- Sensor interfacing and signal conditioning
- Experimental system identification
- Theoretical system modelling
- Parameter estimation and model validation
- Speed and position control
- Controller design to specification
- Gain scheduling and aerospace control
- State-space modelling and control
- LQR controller optimization
- Kalman filters/LQG controller design
Group Citation: Aerospace
Explore more: All Research Paper
Related Products
QLabs Virtual Quanser AERO
THIS PRODUCT IS NO LONGER AVAILABLE.

3 DOF Hover
Flight dynamics and control of vertical lift-off vehicles

