QLabs Virtual Quanser AERO

THIS PRODUCT IS NO LONGER AVAILABLE.
Please visit QLabs Virtual Aero 2.
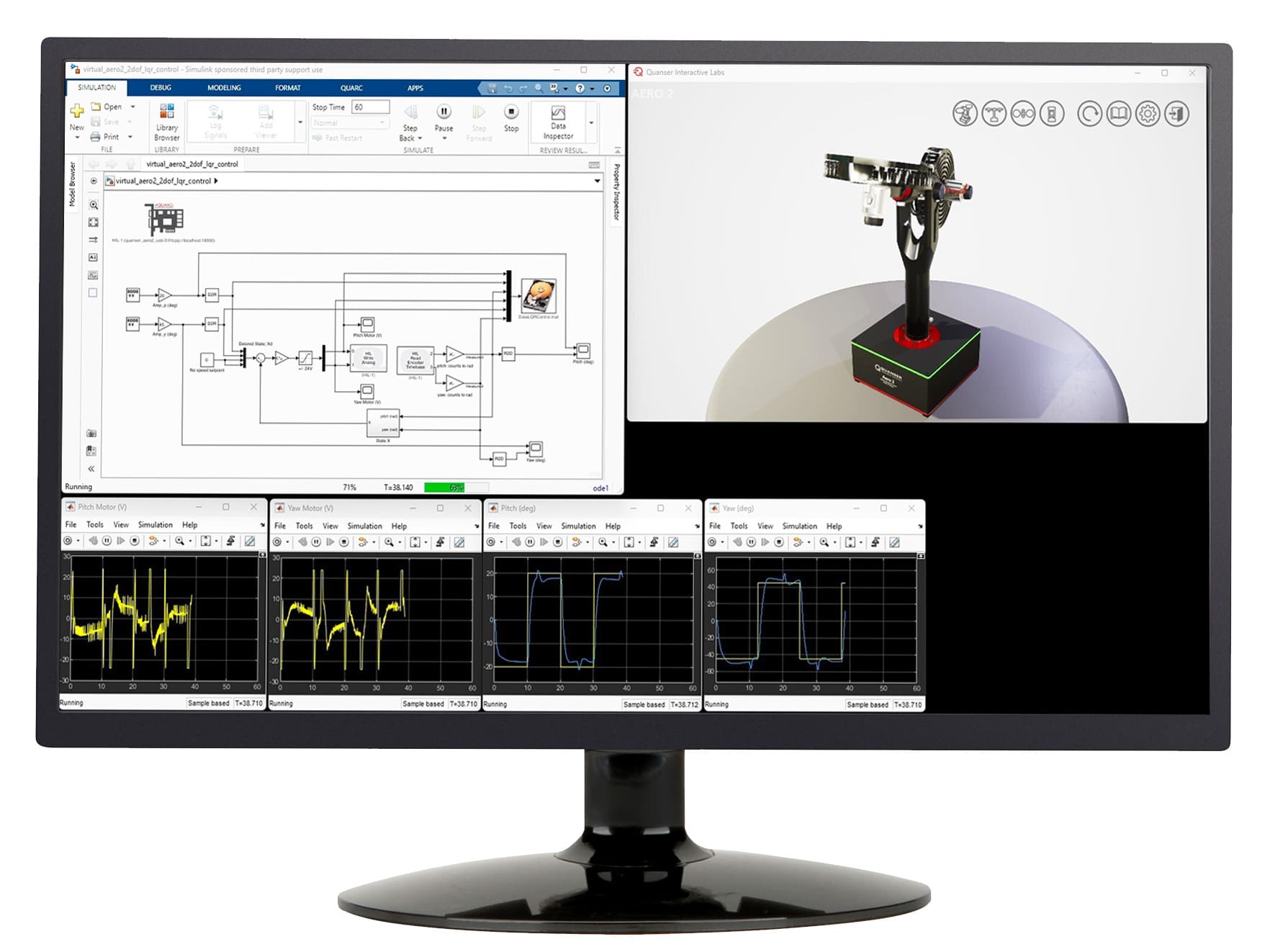
QLabs Virtual Quanser AERO is a fully instrumented, dynamically accurate virtual twin of a Quanser AERO system. It behaves in the same way as the physical hardware and can be measured and controlled using MATLAB®/Simulink® and other development environments. QLabs Virtual Quanser AERO can enrich your lectures and activities in traditional labs, or bring credible, authentic model-based lab experiences into your distance and blended aerospace and control systems course.
QLabs Virtual Quanser AERO is available as a 12-month multi-seat subscription. The platform is compatible with the physical Quanser AERO curriculum which covers concepts including modelling, system identification, attitude and speed control, PID control, gain scheduling, state-feedback control, coupled dynamics, and Kalman filter.
Product Details
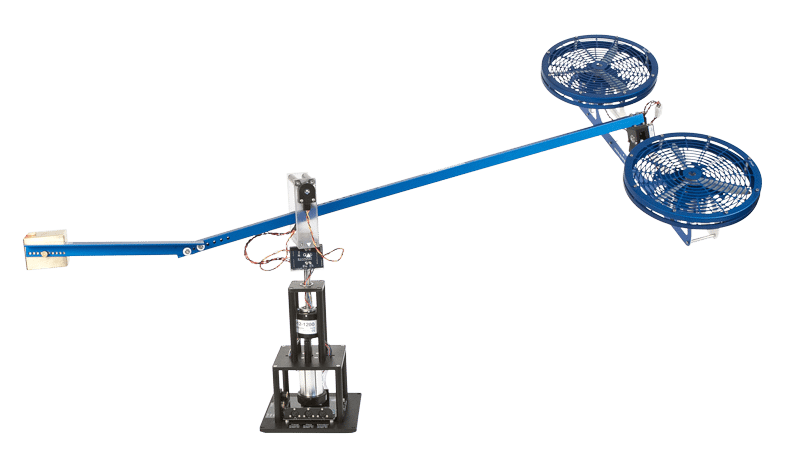
Same as the physical Quanser AERO, the virtual system is a dual-rotor helicopter model that can be reconfigured for 1 DOF attitude, 2 DOF helicopter, or half-quadrotor experiments. Rotary encoders measure the angular position of the propeller DC motors, the speed of the motors is measured through a software-based tachometer.
- High-fidelity, credible lab experiences equivalent to use of physical lab equipment
- 12-month multi-seat subscription
- Full access to system parameters through MATLAB®/Simulink®
- Comprehensive curriculum for 1 DOF attitude, 2 DOF helicopter, and half-quadrotor configurations
| App download & access to subscription management | Quanser Academic Portal |
| App OS compatibility | Microsoft Windows 10 64-bit |
| Required software | MATLAB and Simulink R2020a or later (not included) |
| Minimum system requirements | Video Card: Intel HD 520 or equivalent DX11 GPU Processor: Core i5-6300U series mobile CPU or equivalent Memory: 8 GB RAM |
| Recommended system requirements | Video Card: Intel UHD 620 or equivalent GPU Processor: Core i7-8665U series mobile CPU or equivalent Memory: 16 GB RAM |
ABET-aligned Instructor and Student Workbooks with complete lab exercises, covering topics:
- Hardware integration
- Single propeller speed control
- Pole-placement state-feedback balance control
- 1 DOF attitude control configuration
- PID control
- Iintroduction to IMU
- Modeling and model validation using transfer function
- System identification
- Gain scheduling
Laboratory Guides with modeling and control design examples:
- 2 DOF helicopter configuration
- Modeling
- Linear state-space representation
- State-feedback control
- Coupled dynamics
- Half-quadrotor configuration
- Modeling
- Simple yaw control
- Kalman filter
Group Citation: Software
Explore more: All Research Paper
Related Products

Qube-Servo 2
THIS PRODUCT IS NO LONGER AVAILABLE.
3 DOF Helicopter
Advanced flight dynamics and aerospace control experiment

3 DOF Hover
Flight dynamics and control of vertical lift-off vehicles