
3 DOF Helicopter

Advanced flight dynamics and aerospace control experiment
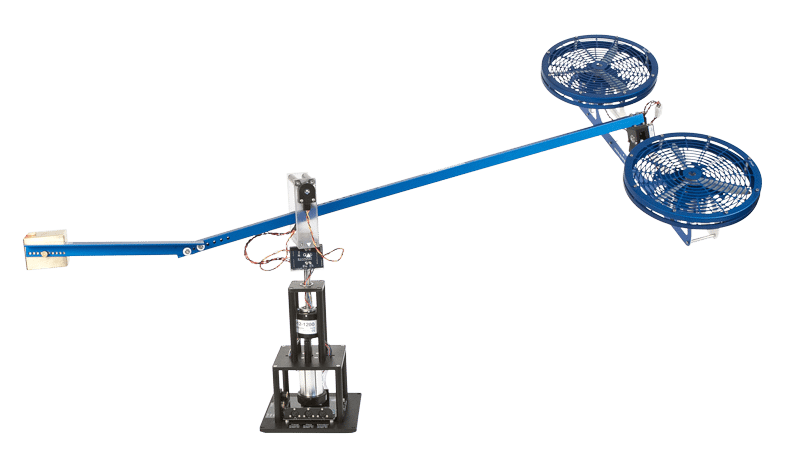
The 3 DOF Helicopter experiment provides a bench top model of a Tandem rotor helicopter. It can be used to understand and develop control laws for a vehicle that has dynamics representative of a dual rotor rigid body helicopter, or any device with similar dynamics.
Gallery

Product Details
The helicopter body is suspended from an instrumented joint that is mounted at the end of an arm and is free to pitch about its centre. The other end of the arm is fastened to the base using a two degree of freedom joint, allowing the helicopter to rotate about the vertical axis as well as up and down. The other end of the arm has an adjustable counterweight that changes the effective mass of the helicopter system – making it light enough to be lifted by the thrust from the propellers. All axes are measured using high-resolution encoders to obtain precise position feedback. The slip ring mechanism on the vertical axis allows the body to rotate continuously by eliminating the need for any wires to connect the motors and encoders to the base. The front and back propellers control the movement of the helicopter.
- Three degrees of freedom (3 DOF): body rotates about pitch, travel and elevation axes
- Propellers driven by high-quality Pittman DC motors
- High-resolution optical encoders for precise position measurements
- Slip ring allows infinite motion about the vertical and travel axis
- Easy-connect cables and connectors
- Precise, stiff and heavy-duty machined components
| Device Mass | 6.2 kg |
| Device Height (Ground to Top of Base) | 45 cm |
| Device Length (Counterweight to Front Propeller) | 127 cm |
| Helicopter Body Mass | 1.15 kg |
| Helicopter Body Length | 49.8 cm |
| Base Dimensions (W x L) | 17.5 cm x 17.5 cm |
| Pitch and Elevation Encoders Resolution (in Quadrature) | 4096 counts/rev |
| Yaw/Travel Encoder Resolution (in Quadrature) | 8192 counts/rev |
| Pitch Angle Range | 64 (± 32.0 deg) |
| Elevation Angle Range | 63.5 deg |
| Travel Angle Range | 360 deg |
| Pitch Force Thrust Constant | 0.22 N/V¹ |
| Propeller Diameter | 20.3 cm |
| Propeller Pitch | 15.2 cm |
| Pitch/Front Motor Resistance | 0.83 Ω |
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Quanser VoltPAQ-X2 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Quanser VoltPAQ-X2 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with two Quanser Q1-cRIO modules
- Quanser Q8-USB
- Quanser QPIDe
Group Citation: Aerospace

Related Products
Quanser AERO
THIS PRODUCT IS NO LONGER AVAILABLE.

3 DOF Hover
Flight dynamics and control of vertical lift-off vehicles
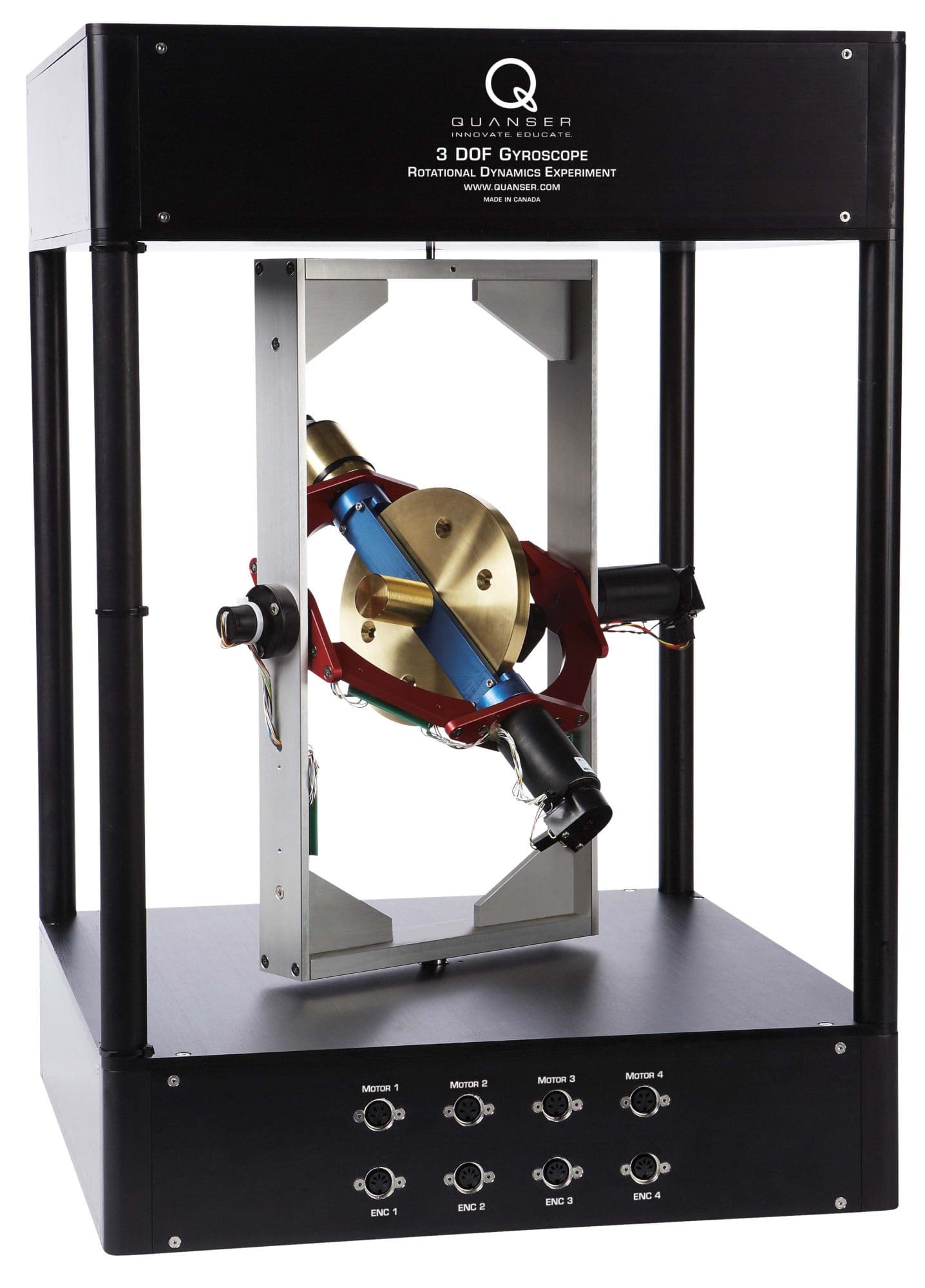
3 DOF Gyroscope
Advanced platform for aerospace modelling and control research
Drone Research Lab
A High-Performance Platform for Accelerating Drone Research.
