An Idea Birthed at ACC
Quanser has been a part of the American Controls Conference (ACC) for years. If you’ve had a chance to go to ACC and you ask about Quanser one familiar response you’ll hear is “Oh yeah they are the pendulum guys!”. This quote refers to one of the core products in Quanser’s list of controls related devices, the Qube Servo 2. In its’ 30+ year history Quanser has had the vision to develop and introduce, to universities all over the world, a set of highly complex and feature complete solutions. With this line of thinking and introduced in 2020, the Quanser QCar has given researchers the ability to dream about taking the complexities and nuances of real world driving and bring them into an indoor university setting. What’ been the catch so far? How does Quanser (As a group of research minded design engineers) help bring this vision into reality? This takes us into ACC 2022.
In an effort to articulate all the research capabilities available to professors in an easy to conceptualize application, our Chief Operating Officer Paul Karam architected a 3-vehicle driving demonstration. Combining aspects of self-localization, a centralized infrastructure, artificial intelligence for sign recognition and the use of sounds as audible cues, Quanser brought to ACC an idea of how interconnected systems (which resemble the real world) could be brought into a university lab. The demonstration would also spark the interest of the ACC committee for 2023 which were interested in bringing the QCar back and potentially do a more interactive/engaging approach to self-driving applications.

Figure 1: ACC 2022 with QCar multivehicle demo
The Ultimate Map
Have you ever opened google maps and asked yourself “How do we get to this point, were a real-time map lives in my pocket?” Well, we’ll come back to this question in a second. Given the feedback received from ACC 2022 the call to action was made to design a competition which would engage the research community but also be generic enough to have all types of research groups comfortable enough to say, “Yes I want to compete!”. Using the DARPA subterranean challenge as inspiration, the idea of creating a feature rich map was born. Everyone has an idea of what a map is, sometimes understood as an occupancy grid which describes the regions of occupied and empty spaces, with this representation expanded into a voxel map which includes the 3D component of obstacles. Maps can also be a representation of lane markings and key objects in the environment where the depth representation may not be needed but an understanding of the drivable scene is more important. This is what the competition really focused on. This is where we come back to the question asked at the beginning but in broad terms, what makes the ultimate map?
The Ultimate Car
Adding another layer of complexity was the introduction of autonomous driving. The long-term goal for an autonomous vehicle is to travel to a desired destination without human intervention. Could we ask teams to create the ultimate map and implement an autonomous stack as well? This was the bonus task we asked students to include in their software application. their final implementations would prove some feasibility of autonomous driving while mapping to be within reach.
The ACC Challenge
These two ideas became the cornerstone of the ACC competition. Students were put in the perspective of an autonomous driving engineer working for a big company within the self-driving space. The ask for each team was to perform the following tasks:
- Could they develop a map which defines the world the car is driving in.
- Could they identify key objects in the environment and place them on the world map.
- Could they demonstrate aspects of self-driving while generating this world map.
- Summarize the findings of the map in a readable form.
These 4 key concepts would be used to interpret their final results.
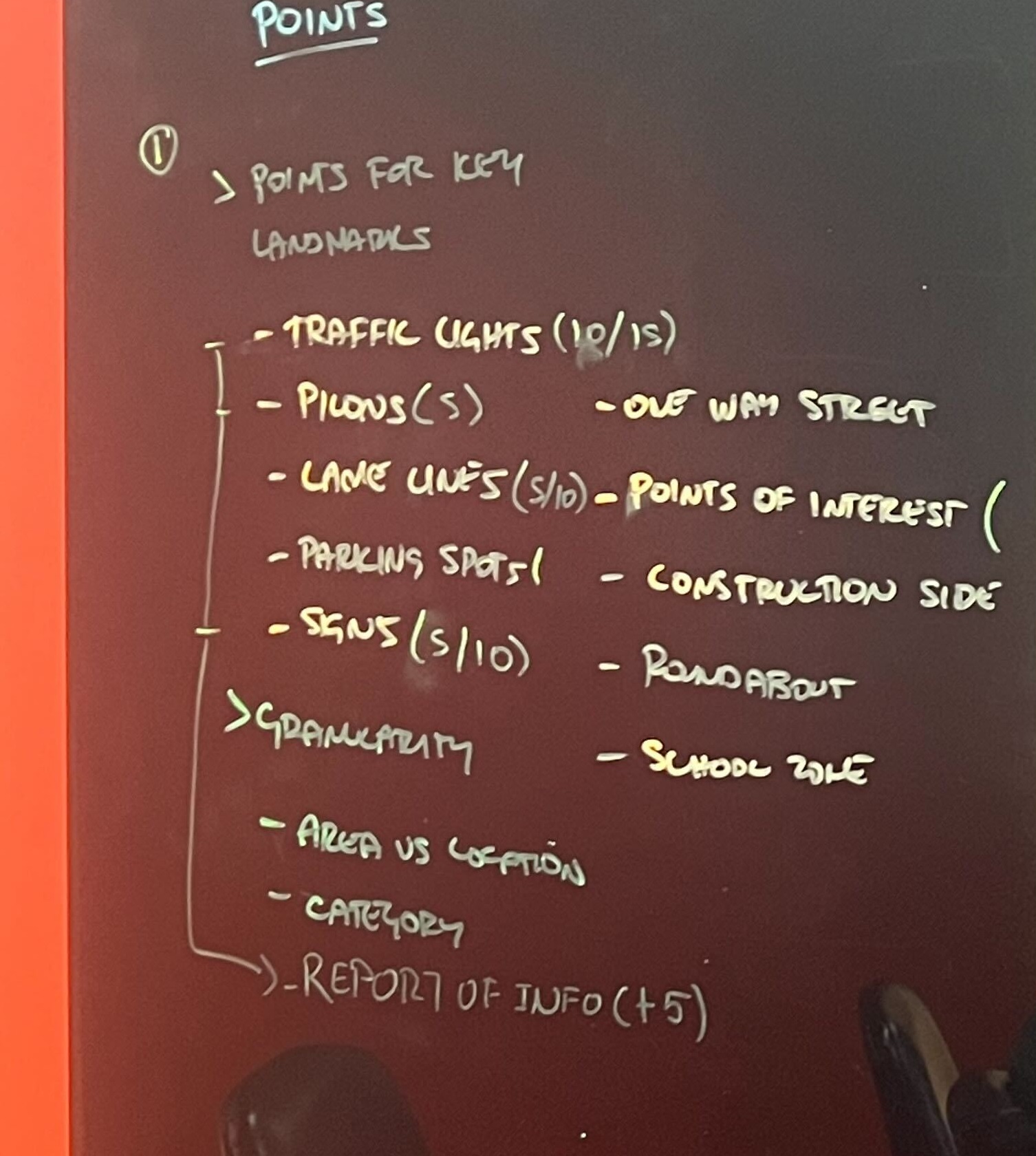
Figure 2: Brainstorming of Potential Scoring for ACC Competition
From Virtual to Physical
Prior to the competition in San Diego each team was given access to a virtual representation of the QCar in either windows or Linux. To ensure teams had freedom in their implementations the software environments which were open for development were:
- MATLAB/SIMULINK
- Python3 (native)
- ROS1&ROS2
The next challenge was ensuring virtual environment support in both windows and Linux. Utilizing the flexibility of Quanser’s rapid prototyping environment QUARC every student had the ability to read sensor information regardless of the development environment.
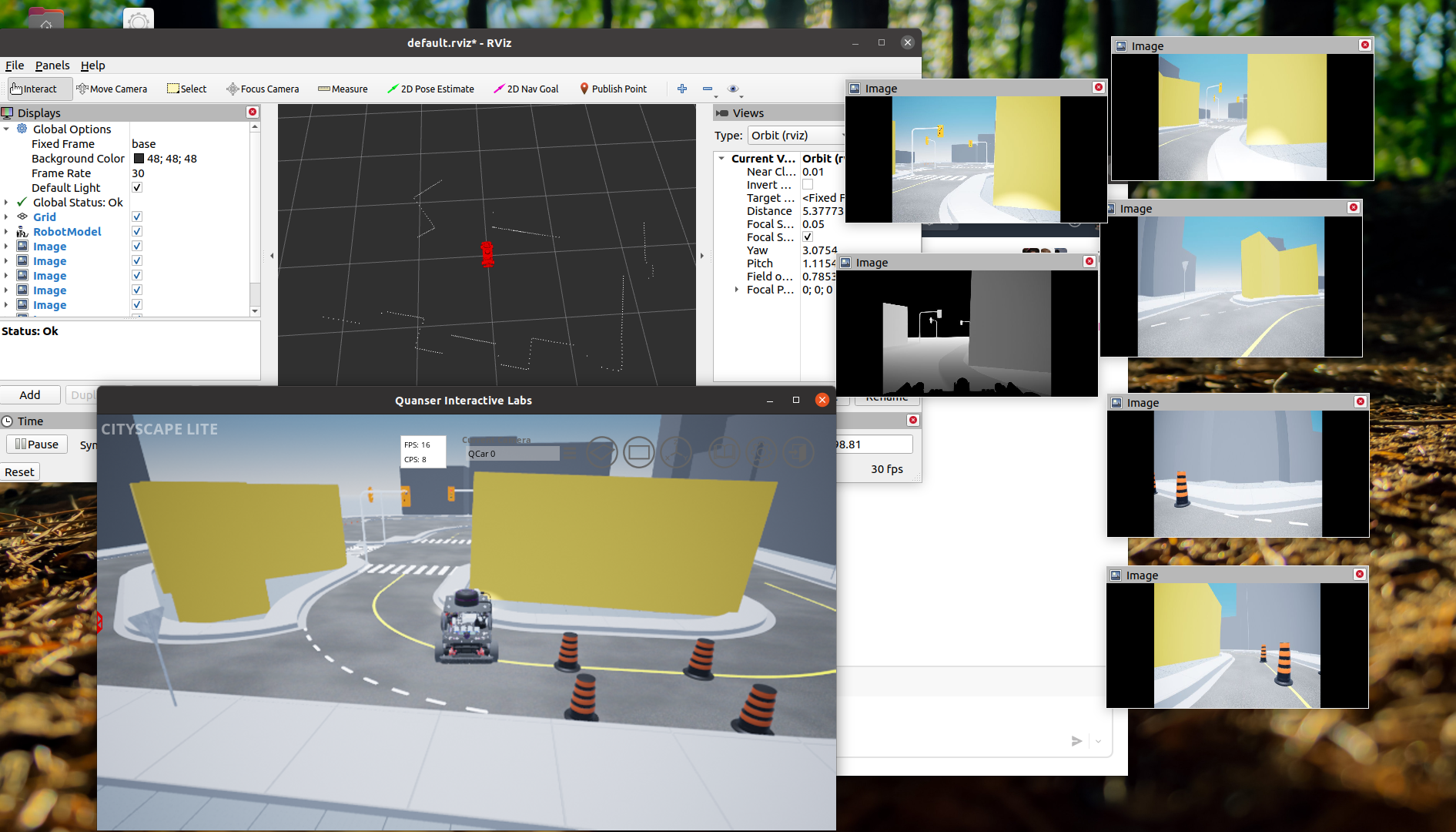
Figure 3: Testing of virtual QCar using ROS.
It’s Game Day
Leading up to ACC 2023 one of the challenges before us was to recreate the virtual environment with the physical map where students will be driving. To give flexibility we designed a custom set of buildings to represent the geometric features in the virtual map. Thanks to the smart traffic lights which come with the SDCS (include link) studio another layer of complexity was added as we had the capability to control the traffic lights at any given time.
Once at the hotel, and after some looking around for our skids, the Quanser sales and engineering teams put together the map for our first ever self-driving car competition.

Figure 4: Quanser team building the physical testing arena.

Figure 5: Set up the competition
The Tale of the Tape
All together 4 universities participated in the self-driving car competition:
- University of South Florida
- Arizona State University
- Northeastern University
- Purdue University
The software environments utilized were both SIMULINK and ROS, with no team opting to use python natively. During the next two days the students spent time porting over their code from the virtual environment to the physical test area. Both Quanser and the students were presented with a challenge on how to make this change as smooth as possible with a lot of learning experiences for the next generation of this competition.
Students were judged on the performance of their solution on the physical arena as well as the topics they were able to implement and demonstrate during the presentation portion of the challenge.

Figure 6: Purdue University presentation.
Every team demonstrated some aspects of self-driving and map generation with Purdue University and Northeastern having an impressive presentation on their approach to this challenge. The judging panel was comprised of Craig Buhr from MathWorks, Jonathan How from MIT, Paul Karam our Chief Operating Officer and myself, from the Academic Applications team at Quanser. While it came to a split decision the winning team was Northeastern University with an impressive display of object detection utilizing a YOLOV4 object detector, Occupancy Grid map representation, and key object identification and data summary (Link to their work: Self-Driving Car Competition – YouTube )

Figure 7: Winning team – Northeastern University
ACC 2024 and Beyond
Quanser will be attending ACC 2024 which also happens to be in Toronto Canada. This presents a unique opportunity for Quanser to present a more feature complete competition. After having conversations with prospective and current Quanser users there was a lot of interest in competing during ACC 2024. To expand the reach of the competition we are exploring the idea of making two tracks or two competition modes. The qualification criteria could differ slightly depending on if you’ve used Quanser hardware or not giving every team a competitive playing field. The geographical location also helps Quanser with the complexity of the physical environment. The first iteration of the competition looked at changing signs and modified lighting conditions. Having easier access to the competition arena also allows us to expand how visually complex the buildings are to add an extra layer of difficulty to the ACC competition.
Keep an eye out on the announcement for the ACC 2024 competition! Quanser is looking forward to the types of results that teams can present with the SDCS studio! You never know, your research institution may win a QCar!