Webinar Details
Join MathWorks and Quanser for an in-person session focusing on the intersection between software and hardware, trends in research and teaching, and what’s new in Mechatronics, Robotics and more!
You can drastically reduce your effort in designing and constructing projects and labs using the integrated power of Quanser’s hardware lab solutions and the MathWorks’ model-based design software tools.
Please bring your questions about both tools and the research landscape to take up with the teams from both companies.
Robotics Made Easy with MATLAB & Simulink (presented by Terry Denery. Ph.D.)
As today’s systems have grown ever smarter, embedded software has taken on an increasingly significant role in integrating a diverse range of electrical and mechanical components to make what seems like magic happen. Developmental testing guides the software design process to optimal system performance, while continuous operational testing assesses the quality and identifies any necessary upgrades. As we all know, more and better testing always helps! But how do you iterate the build and test process and remain fast?
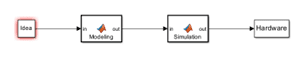
Simulink enables you to replace prototypes with simulations that directly support the software design process. Once hard constraints on time and money for prototypes are relaxed, see what great ideas can come to life in the form of new and better systems! We will cover the following topics in our session:
- Model Mechanics
- Model Electronics
- Design Control
- Deploy to hardware through C Code Generation
Real-Time Application Development With Quanser Hardware (presented by John Pineros)
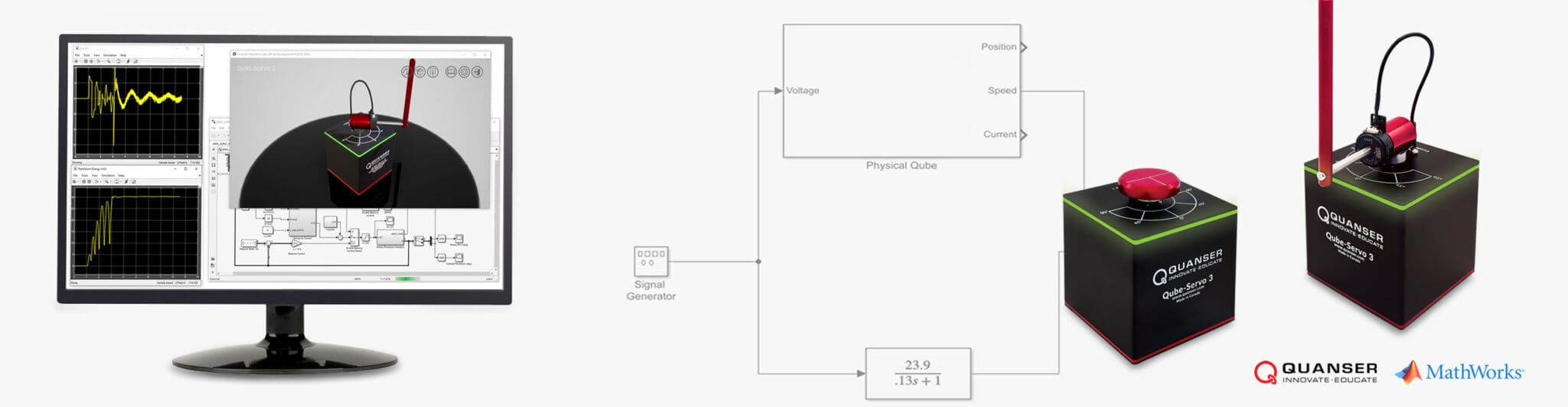
- Hands on Hardware-In-the-Loop Control using Qube Servo 2
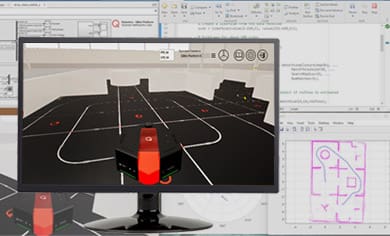
- Object detection using the Deep Learning Object Detector from within the Quanser Virtual Environment
- Overview of the released QArm MathWorks file exchange example to go from simulation to hardware
Presenter’s Bio

Terry Denery, Ph.D.
Prior to MathWorks, Terry developed rocket motors at Hercules Aerospace (Now Aliant Technologies), and focused deeply on mechanical design and analysis at MSC, supporting use of products like ADAMS, Working Model, and visual NASTRAN. Since joining MathWorks in 2004, Terry has met thousands of engineers to discuss control design and modeling electro-mechanical devices.
Education: Ph.D. in Aeronautics/Astronautics, Stanford University; B.S. in Chemical Engineering and M.S. in Mechanical Engineering, University of Virginia
Please check Terry out on Youtube: Mechatronics, and Control Systems

John Pineros
John Pineros is part of Quanser’s R&D Academic Applications team, which develops content for teaching undergraduate controls concepts as well as research examples for our studio offerings.
For over 6 years, John has been involved with training end users on how to set up and use Quanser’s Autonomous Vehicles Research studio, as well as developing ROS examples for the initial release of Quanser’s Self-Driving Car Research Studio.
John has also represented Quanser internationally at tradeshows. John holds an M.Eng from the Mechanical and Industrial Engineering department at the University of Toronto where he specialized in Autonomous Unmanned Systems.