I consider myself lucky to seemingly have an endless opportunity to work on really cool projects at Quanser. And sometimes, few of those projects turn into something special. This was the case when I was introduced to Sam Stubblefield and Joshua Borsman. Two Seattle-based artists known for a collaborative, anti-disciplinary approach to their work, who frequently merge unusual materials and situations, such as plants, boats, computer vision, earthquakes, the internet, jellyfish, reusable suborbital rockets, and the list goes on.
I ended up helping Sam and Josh on an interactive art installation that involved real-time control of a non-linear system. They took a standard QUBE-Servo 2 inverted pendulum and customized it to interact with visitors by tracking the position of their faces. Recently Sam wrote about his installation on his website and I though I share it with our readers. So here it goes.
Images and text below ©2020 Samuel Stubblefield, LLC
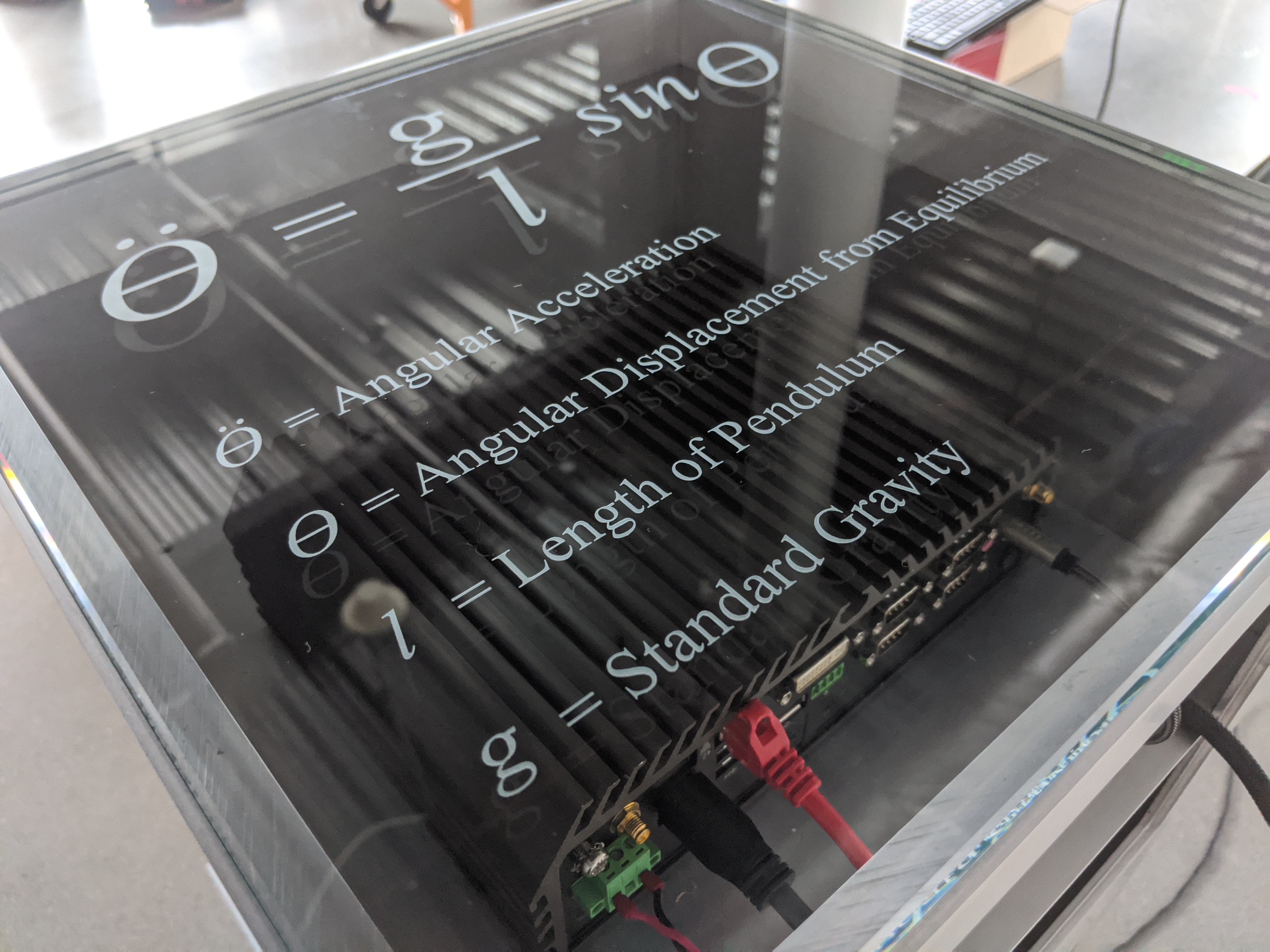
INVERTED PENDULUM 00001The inverted pendulum is an inherently unstable system used as a classic illustration of control theory and control of nonlinear systems. In this interactive sculptural installation, we illustrate a control system in the form of a Furuta inverted pendulum. The inverted pendulum models an unstable, nonlinear system. With the application of control theory, the entire system is modeled and linearized. The free-swinging carbon fibre arm is held up by horizontal movement. The computer that is controlling the horizontal movement observes and corrects relentlessly.
Understanding control theory can help anyone understand and control complex systems. At its most basic, control theory is used to understand the current state, determine the desired outcome, and build a system that controls for the desired outcome. Alongside its theoretical value, this sculpture illustrates practical applications ranging from creative thought processes to rocket stabilization. Control theory touches nearly every type of engineering and is even as far-reaching as sociology and art. It encompasses machine-learning models, simulating predictions, dynamic interactions, filtering and rejecting noise, sketching and building hardware, procedural testing, and completely understanding a system. Control theory is the glue that connects every engineering discipline from Aerospace, Civil, Communications, Industrial, Mechanical, Electrical, and Software. The Inverted Pendulum installation makes subtle material and form references to industries that use control theory on a regular basis:
Project Team:
|
|