

Challenge
Teach second-year undergraduate electrical and computer engineering students about control systems for aerospace systems. The objective is to start getting them ready to work with the Quanser QDrone in the Autonomous Vehicle Research Studio (AVRS) system.
Solution
Quanser AERO
Result
Sacred Heart University have been involved in teaching engineers in unique and novel ways. One of these was using the Autonomous Vehicle Research Studio (AVRS) system to teach undergraduate students. Dr. Tolga Kaya did a YOUser webinar showing this amazing work and published a research paper.
- Research Paper: https://digitalcommons.sacredheart.edu/computersci_fac/154/
- YOUser Webinar: https://www.quanser.com/webinars/2021-06-shu-smart-vehicle-ece-curriculum/
Prof. Kaya had a new set of students that were eager to work with the Quanser drones. However, this time around Prof. Kaya wanted to ensure they had enough background in how to use modeling and control systems for aerospace applications prior to working with the Quanser QDrones. The challenge is the four students were in their second-year undergraduate Electrical & Computer Engineering (ECE) program. They had not taken any courses in modeling or control system and had not prior knowledge of MATLAB/Simulink. Given the timeline, Prof. Tolga wanted to fast track them to learn about many concepts in a practical, hands-on way.
The Quanser AERO and QUARC Real-Time Control Software were used to teach the students about control systems and rapid controls prototyping software.
Initially we thought about using different Quanser systems, but after some discussion we settled on using the Quanser AERO because it is stationary and be used to teach a wide range of topics of different difficulty levels. Thus, by using the different available sensors and configurations, the AERO can be used to teach introductory topics to advanced ones. When asked if the AERO was the right choice for the workshop, Prof. Kaya said “let me put it this way, if I were to teach a whole semester class, I would spend half of the semester on AERO.”
Together with Quanser, a 5-part online workshop was delivered that introduced the students to many control systems concepts as well as helping them further their MATLAB/Simulink skills. Here is an overview of the labs that were covered in the workshop.
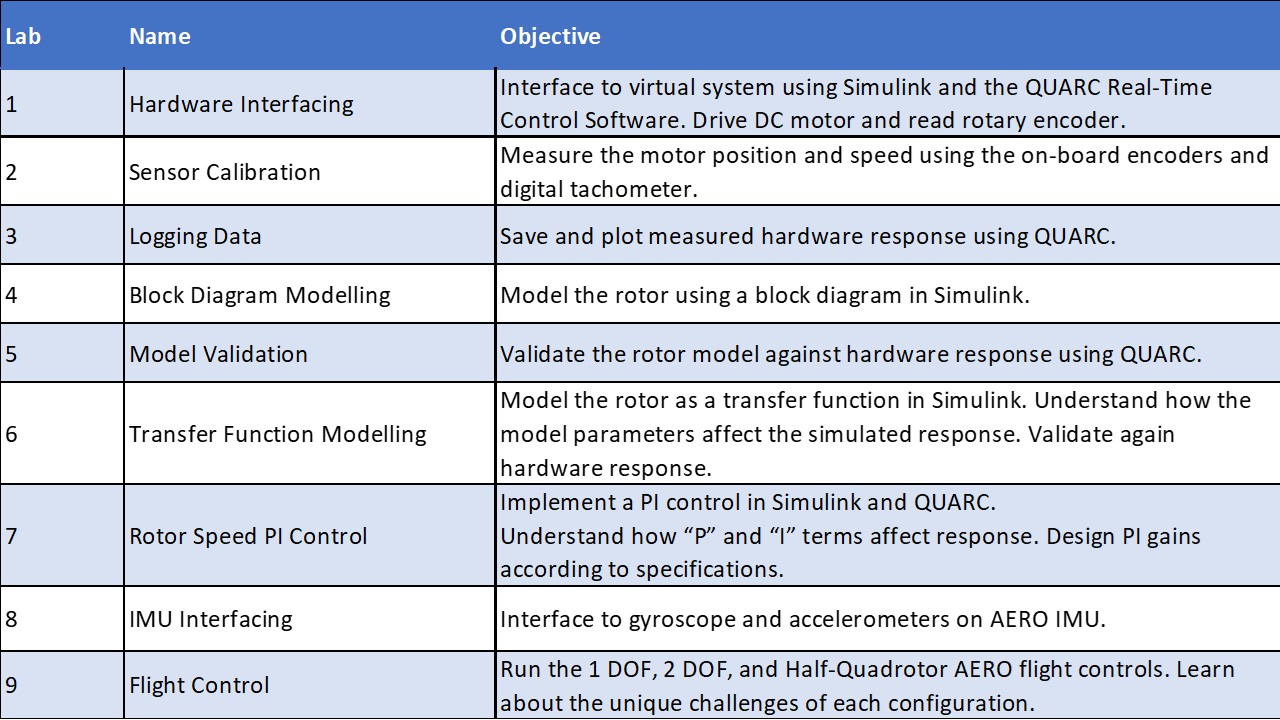
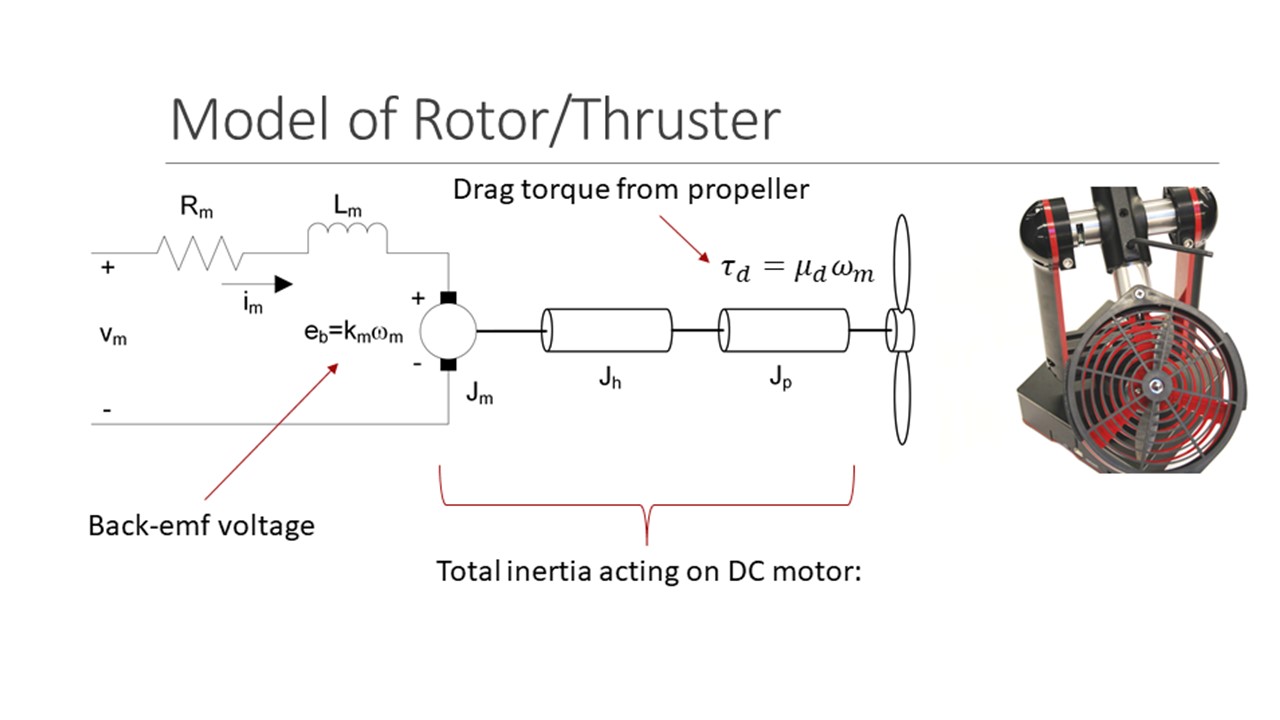
Figure 1 – Teaching the students about modelling a rotor
The students conducted the experiments on the Quanser AERO hardware at Sacred Heart University lab while Prof. Tolga supervised them. The workshop was delivered remotely by a Quanser Application Engineer.

Figure 2 – Student in the Sacred Heart University lab.
This aerospace control systems workshop provided a great “jump start” and placed the students on the right path to begin working with the Quanser AVRS system. Students enjoyed the workshop and being able to interface to an “already working” system. After working through the labs after the workshop session by themselves, they were able to gain a good grasp of system-level design.
Prof. Kaya mentioned that “this was the first time the students interacted with an engineer that was not a professor, and it made the students more attentive than usual”. If he were to do the workshop again, the “content would remain the same” but having “pre-workshop exercises and background would make it more effective”.
Students were awarded a Credly Control System: Quanser AERO badge showing that they learnt HIL and control systems concepts and were supervised by Prof. Kaya and a Quanser Engineer.
https://www.credly.com/org/sacred-heart-university/badge/control-systems-quanser-aero
Prof. Kaya and Quanser organized another workshop with the Quanser Qbot to introduce the students to unmanned ground vehicles. The Qbot is also one of the vehicles used in the Quanser Autonomous Vehicle Research (AVRS) Studio, along with the Quanser QDrone. In this workshop, the students learned about the unique sensors and actuators that mobile ground robots have, how to interface to the hardware in Simulink through QUARC and used image thresholding and closed-loop control for real-world applications including line following. This helps the students build the necessary skills to do more advanced work with the drones and camera-based localization in the AVRS system.


