Webinar Details
The recording of the webinar is now available.
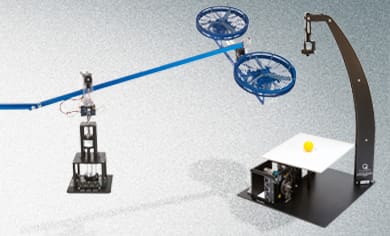
 Over the last decade, Prof. Mascaro has developed a unique hands‐on curriculum for a course in Robot Control at the University of Utah. This curriculum covers the fundamentals of dynamic motion control and force/interaction control. In cooperation with Quanser, Prof. Mascaro has designed a modular open‐architecture 2‐DOF robot, where the motor torques can be directly and safely controlled using MATLAB/Simulink.
Using a MATLAB Graphical User Interface (GUI) and series of Simulink Models, students can first simulate and then experimentally implement a variety of dynamic robot control techniques. Motion control techniques such as feedforward computed torque control, inverse dynamics control, robust sliding mode control, and adaptive control are used to demonstrate how to compensate for the nonlinear robot kinematics and dynamics to achieve fast and accurate trajectory tracking in joint space or operational space. Various force and interaction control techniques such as impedance control, admittance control, hybrid position/force control, multi‐robot cooperation, master/slave teleoperation, and visual servoing are used to demonstrate how robots can dynamically interact with their environment. In this webinar, Prof. Mascaro demonstrates how these various motion and force control techniques are implemented on the Quanser robots.
Over the last decade, Prof. Mascaro has developed a unique hands‐on curriculum for a course in Robot Control at the University of Utah. This curriculum covers the fundamentals of dynamic motion control and force/interaction control. In cooperation with Quanser, Prof. Mascaro has designed a modular open‐architecture 2‐DOF robot, where the motor torques can be directly and safely controlled using MATLAB/Simulink.
Using a MATLAB Graphical User Interface (GUI) and series of Simulink Models, students can first simulate and then experimentally implement a variety of dynamic robot control techniques. Motion control techniques such as feedforward computed torque control, inverse dynamics control, robust sliding mode control, and adaptive control are used to demonstrate how to compensate for the nonlinear robot kinematics and dynamics to achieve fast and accurate trajectory tracking in joint space or operational space. Various force and interaction control techniques such as impedance control, admittance control, hybrid position/force control, multi‐robot cooperation, master/slave teleoperation, and visual servoing are used to demonstrate how robots can dynamically interact with their environment. In this webinar, Prof. Mascaro demonstrates how these various motion and force control techniques are implemented on the Quanser robots.
Over the last decade, Prof. Mascaro has developed a unique hands‐on curriculum for a course in Robot Control at the University of Utah. This curriculum covers the fundamentals of dynamic motion control and force/interaction control. In cooperation with Quanser, Prof. Mascaro has designed a modular open‐architecture 2‐DOF robot, where the motor torques can be directly and safely controlled using MATLAB/Simulink.
Using a MATLAB Graphical User Interface (GUI) and series of Simulink Models, students can first simulate and then experimentally implement a variety of dynamic robot control techniques. Motion control techniques such as feedforward computed torque control, inverse dynamics control, robust sliding mode control, and adaptive control are used to demonstrate how to compensate for the nonlinear robot kinematics and dynamics to achieve fast and accurate trajectory tracking in joint space or operational space. Various force and interaction control techniques such as impedance control, admittance control, hybrid position/force control, multi‐robot cooperation, master/slave teleoperation, and visual servoing are used to demonstrate how robots can dynamically interact with their environment. In this webinar, Prof. Mascaro demonstrates how these various motion and force control techniques are implemented on the Quanser robots.