2 DOF Helicopter

THIS PRODUCT IS NO LONGER AVAILABLE.
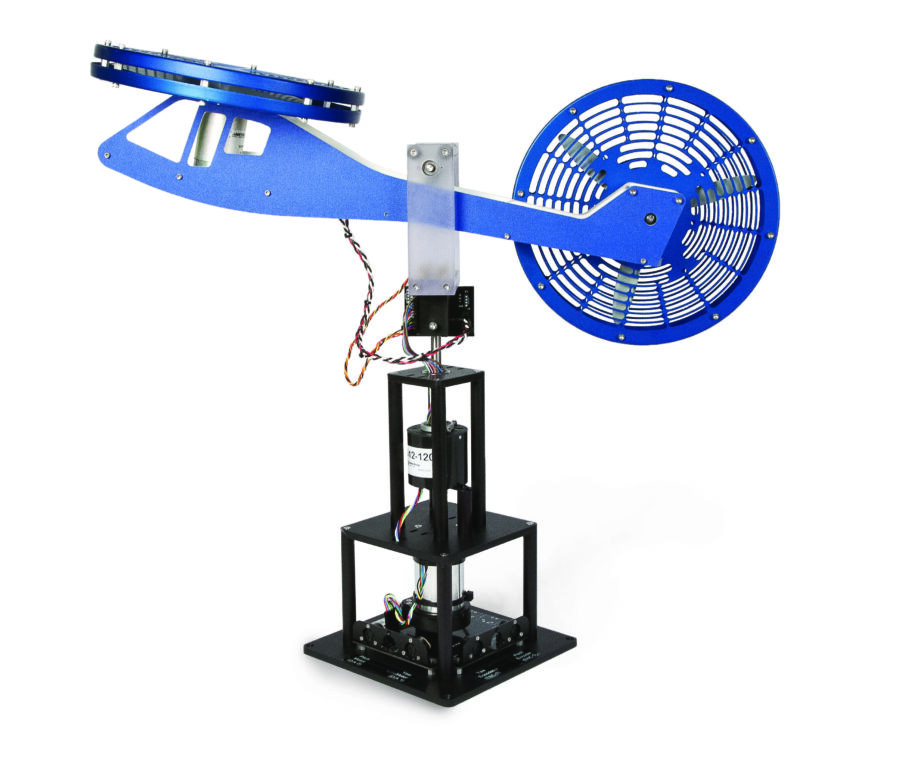
The 2 DOF Helicopter experiment provides an economical test bed to understand and develop control laws for vehicles with dynamics representative of a tethered rigid body helicopter, spacecraft or underwater vehicle.
Gallery


Product Details
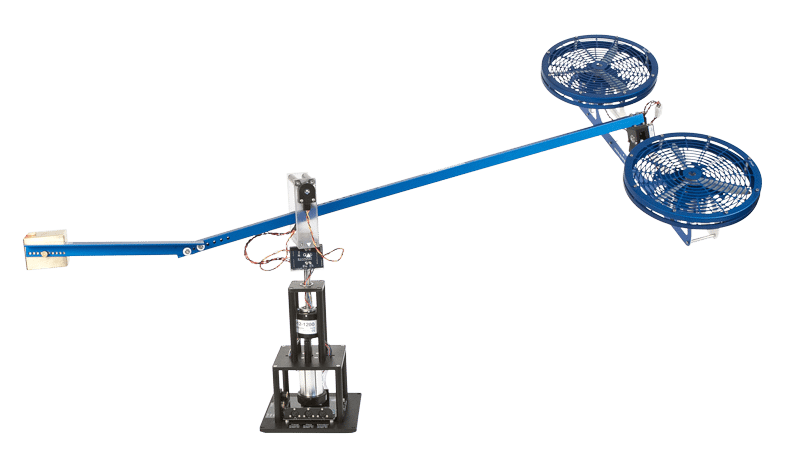
The 2 DOF Helicopter emulates a helicopter configuration with a main rotor and anti-torque tail rotor. The front propeller controls the pitch axis – rotating the center of the body about the horizontal. The back propeller controls the yaw axis – the angle about the vertical base. Both axes are measured using high-resolution encoders. The slip ring mechanism on the vertical axis allows the body to freely rotate about the yaw angle, by eliminating the need for any wires to connect the motors and encoders to the base.
- Two degrees of freedom
- Propellers are driven by high-quality MICROMO and Pittman DC motors
- High-resolution optical encoders
- Slip ring allows infinite motion about the vertical and yaw axis
| Device mass | 3.46 kg |
| Device height (ground to top of base) | 45 cm |
| Helicopter body mass | 1.39 kg |
| Helicopter body length | 48 cm |
| Base dimensions ( W × L) | 17.5 cm x 17.5 cm |
| Pitch encoder resolution (in quadrature) | 4096 counts/rev |
| Yaw/travel encoder resolution (in quadrature) | 8192 counts/rev |
| Pitch angle range | 75 (± 37.5 deg) |
| Yaw angle range | 360 deg |
| Pitch force thrust constant | 0.22 N/V¹ |
| Yaw pitch thrust constant | 0.43 N/V¹ |
| Propeller diameter | 20.3 cm |
| Propeller pitch | 15.2 cm |
| Pitch/front motor resistance | 0.83 Ω |
| Pitch/front motor – current-torque constant | 0.0182 Nm/A |
| Yaw/back motor resistance | 1.60 Ω |
| Yaw/back motor – current-torque constant | 0.0109 Nm/A |
- Derivation of simple dynamic model
- State space representation
- State feedback control with feed-forward and integral anti-windup
- LQR control design
- Control parameters tuning
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Quanser VoltPAQ-X2 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Quanser VoltPAQ-X2 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with two Quanser Q1-cRIO modules
- NI myRIO with Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
Group Citation: Aerospace

Related Products
Quanser AERO
THIS PRODUCT IS NO LONGER AVAILABLE.

QNET 2.0 VTOL Board
THIS PRODUCT IS NO LONGER AVAILABLE.

3 DOF Hover
Flight dynamics and control of vertical lift-off vehicles
3 DOF Helicopter
Advanced flight dynamics and aerospace control experiment