Introduction to Controls Teaching Lab

Turnkey Lab for Scalable, Hands-On Teaching.
Introduction to Controls Teaching Lab is a turnkey setup that covers most controls and dynamics topics and makes hands-on learning easier to bring into the classroom. This solution includes six Qube-Servo 3 units, QUARC software, digital twins, a mobile textbook app, and academic resources. Together, they extend access, improve efficiency, and enable clear, practical teaching with ABET-aligned courseware mapped to leading textbooks. The lab supports MATLAB/Simulink, LabVIEW, Python, and C++, enabling easy integration into diverse teaching and research environments.

Gallery


Product Details
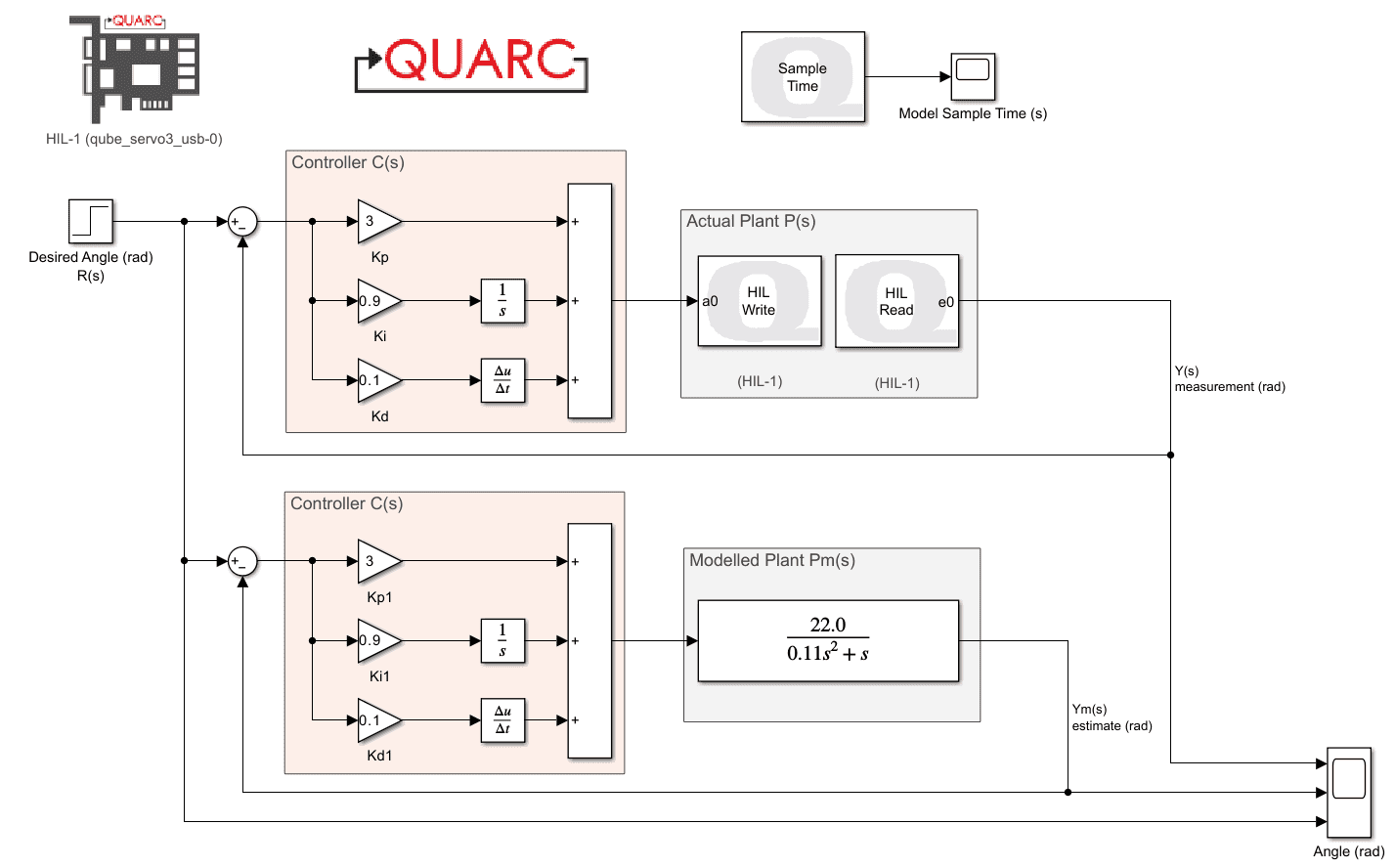
Introduction to Controls Teaching Lab connects control theory to hands-on implementation through a practical and scalable learning environment. At the center of the lab is the Qube-Servo 3, a portable, student-safe platform with integrated actuation, sensing, data acquisition, and amplification. Quick-connect modules, including the inertia disk and inverted pendulum, support learning from foundational control concepts through robust, optimal, discrete-time, and learning-based control.
The lab is supported by ABET-aligned courseware mapped to leading textbooks, giving educators a structured and practical way to teach across courses and departments. High-fidelity digital twins improve access and program efficiency by allowing students to prepare and refine their work before using hardware, while also supporting hybrid and remote learning. Compatibility with MATLAB/Simulink, LabVIEW, Python, and C++ further supports teaching and projects, while making the lab easy to integrate across courses and departments.
| Turnkey Hardware |
|
| Infrastructure |
|
| Digital Twin Subscription | |
| Software Licenses |
QUARC™ Essential Lab License
|
Courseware Topics
| Inertia Disk Module | Pendulum Module |
|---|---|
| Hardware integration | Moment of inertia |
| Filtering | Pendulum modeling |
| Step response modeling | State-space modeling |
| Block diagram modeling | Pendulum balance control |
| Parameter estimation | Swing-up control |
| Frequency response modeling | LQR state-feedback balance control |
| State-space modeling | Pole-placement state-feedback balance control |
| Friction identification | |
| Stability analysis | |
| Second-order systems | |
| Routh-Hurwitz stability | |
| Nyquist stability | |
| PD control | |
| Lead Compensator | |
| Proportional control | |
| Steady-state error | |
| Load disturbance | |
| Robustness | |
| Optimal control | |
| Introduction to discrete control | |
| Discrete control design | |
| Discrete control stability |
Click here to view our comprehensive mapping tool which allows you to align courseware sections with specific chapters of the Experience Controls textbook app, as well as the most popular engineering textbooks such as:
Control Systems Engineering – N.S. Nise
Feedback Systems – K.J. Astrom & R.M. Murray
Feedback Control of Dynamic Systems – G.F. Franklin, J.D. Powell & A. Emami-Naeini
Modern Control Systems – R.C. Dorf & R.H. Bishop
Modern Control Engineering – K. Ogata
Automatic Control Systems – F. Golnaraghi & B.C. Kuo
Control Systems Engineering – I.J. Nagrath & M. Gopal
Mechatronics – W. Bolton
Group Citation: Fundamental Control
Explore more: All Research Paper
Related Products

Qube-Servo 3
The quickest path to practical controls

QLabs Virtual Qube-Servo 3
Virtual platform for distance and blended undergraduate control systems courses
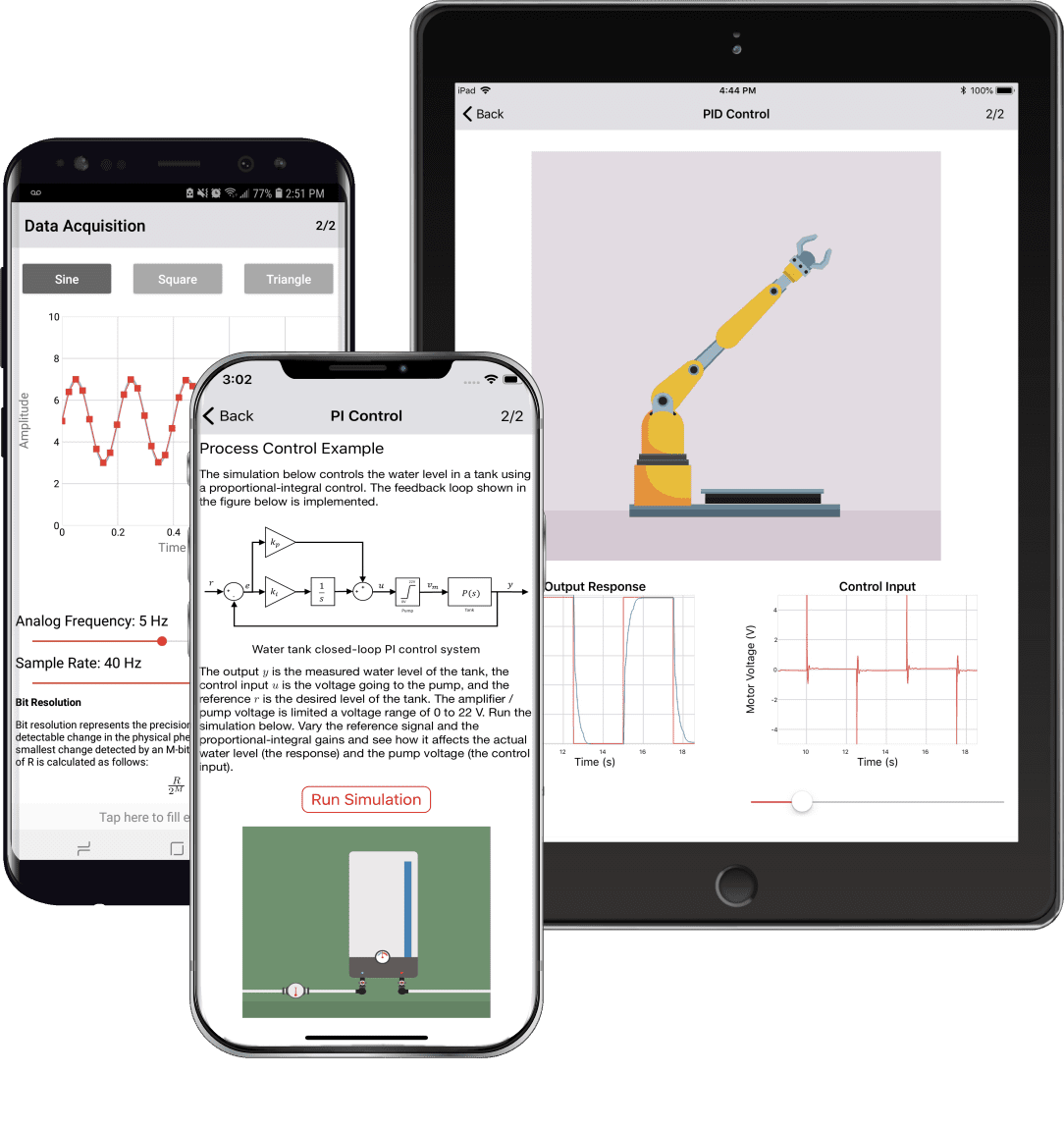
Experience Controls App
Free Mobile Control Systems Textbook