
Back to Products
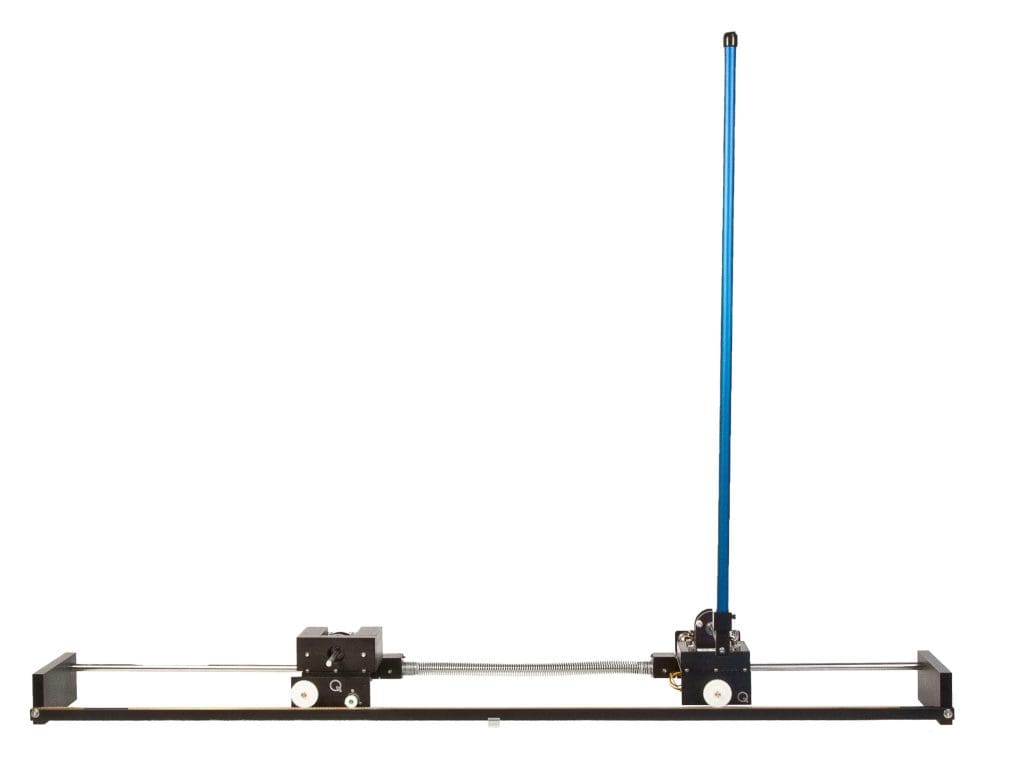
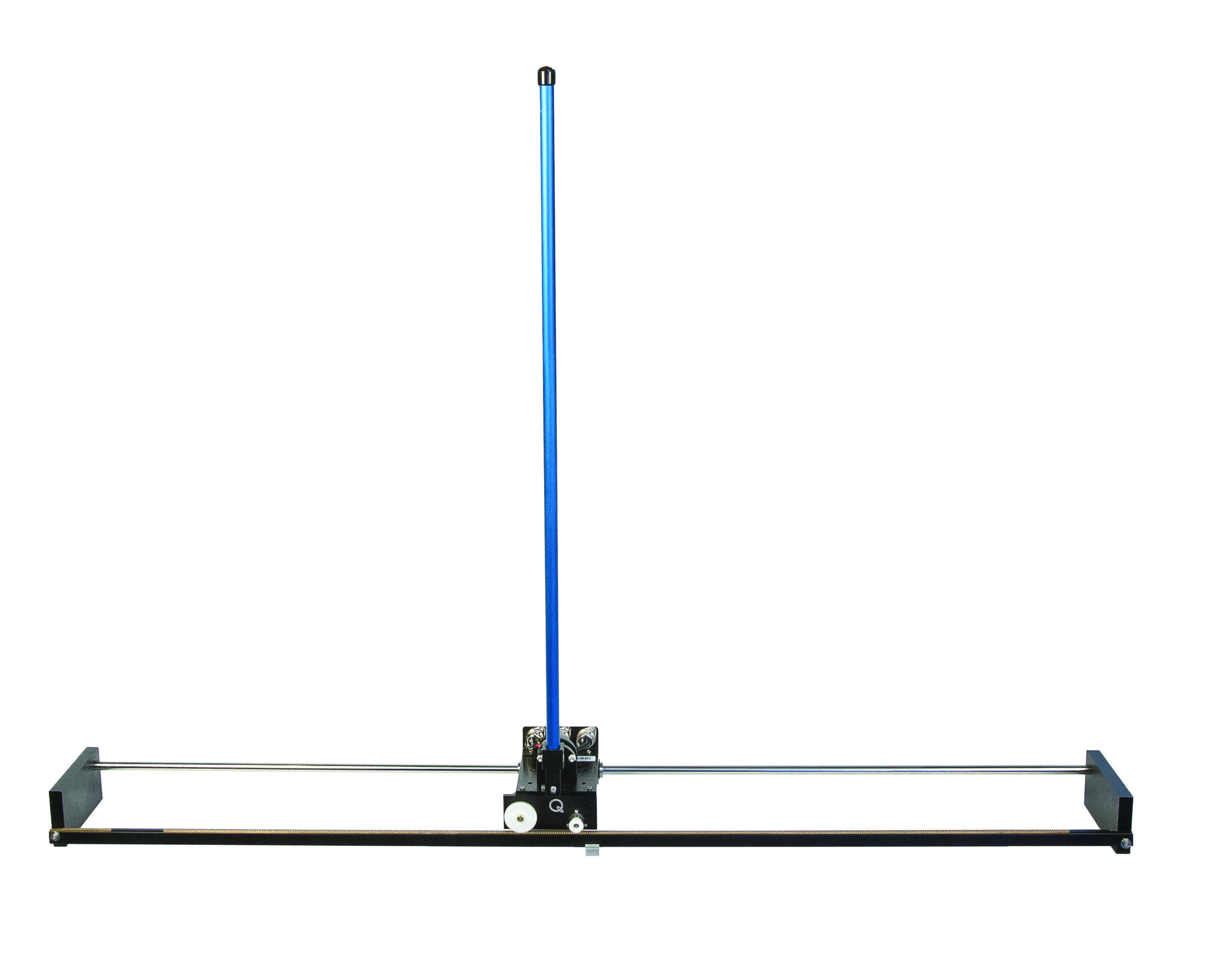
Linear Flexible Joint with Inverted Pendulum

Control Systems & Dynamics
Electromechanical Control
The Linear Flexible Joint with Inverted Pendulum is an ideal way to introduce intermediate control concepts related to vibration analysis and resonance, encountered, for example, in linkages and mechanical transmissions. The experiment challenges students to design a state-feedback control system that can balance an inverted pendulum mounted on the linear flexible joint cart, while minimizing the spring deflection.
Gallery



Product Details
The Linear Flexible Joint with Inverted Pendulum combines two fundamental control challenges to give students an opportunity to a more advanced modeling and control challenge.
| Linear Flexible Joint with Inverted Pendulum Cart Mass | 0.24 kg |
| Weight Mass | 0.12 kg |
| Pendulum Fixture Mass | 0.135 kg |
| Spring Stiffness | 160 N/m |
| Spring Assembly Mass | 0.145 kg |
| Spring Length | 29.0 cm |
| Long Pendulum Length (From Pivot to Tip) | 64.1 cm |
| Long Pendulum Mass (With T-Fitting) | 0.23 kg |
| Medium Pendulum Length (From Pivot to Tip) | 33.6 cm |
| Medium Pendulum Mass (With T-Fitting) | 0.127 kg |
| Cart Encoder Resolution (in Quadrature) | 4096 counts/rev |
| Pendulum Encoder Resolution (in Quadrature) | 4096 counts/rev |
Modeling Topics
- Derivation of dynamic model using Lagrange
- State-space representation
- Parameter estimation
- Model validation
Control Topics
- Linear-quadratic regulator (LQR)
- Vibration control
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Linear Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Linear Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with two Quanser Q1-cRIO
- Quanser Q8-USB
- Quanser QPIDe
Group Citation: Fundamental Control
Explore more: All Research Paper
Related Products
Control Systems & Dynamics
Electromechanical Control
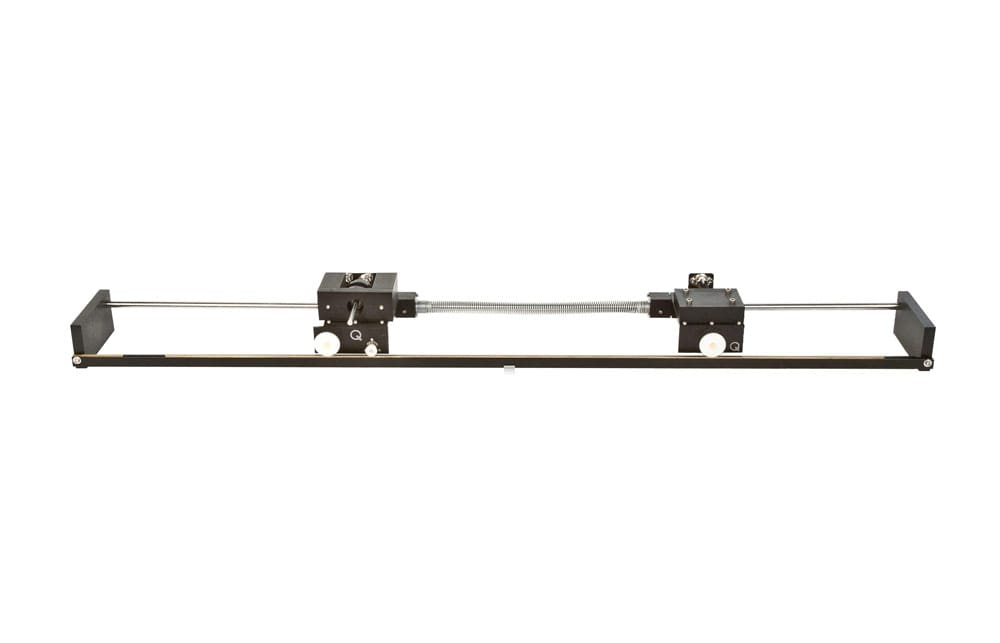
Linear Flexible Joint
Teach the fundamentals of dynamics and control
The Linear Flexible Joint is a passive linear cart that connects to the Linear Servo Base Unit through a linear...
Control Systems & Dynamics
Electromechanical Control
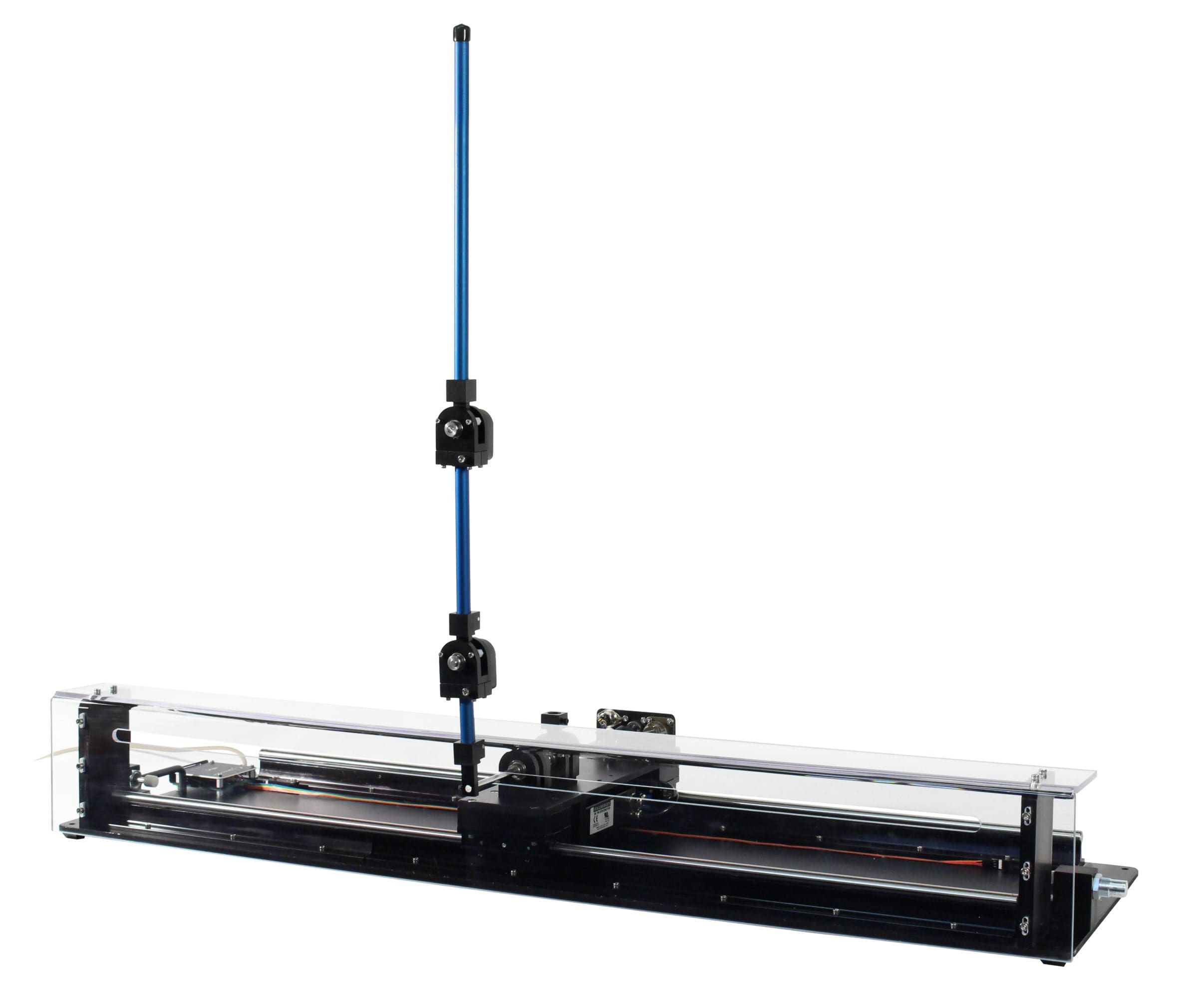
Linear Servo Base Unit with Inverted Pendulum
A modular lab platform for teaching robotics, mechatronics, and controls
The Linear Servo Base Unit is the fundamental unit for the Quanser linear motion platform. It is ideally suited to...
High Fidelity Linear Cart System
THIS PRODUCT IS NO LONGER AVAILABLE.
The High Fidelity Linear Cart is ideally suited to introduce advanced control concepts and theories relevant to real world applications...