QLabs Controls
Credible lab activities accessible off-campus
QLabs Controls is a scalable platform capable of delivering credible, academically appropriate, and high-fidelity lab experiences through interactions with virtual hardware. QLabs Controls is based on Quanser physical plants and is accompanied by a comprehensive curriculum covering topics such as modelling, speed and position control, and aerospace control, instructor resources, and tools to manage student access and monitor their progress.
QLabs Controls is available as a 12-month subscription and runs on Windows, macOS, iOS, and Android with no need for any institutional IT infrastructure or resources to integrate the platform.
To access and manage your QLabs Controls subscription, log in to your Quanser Academic Portal account.

Product Details
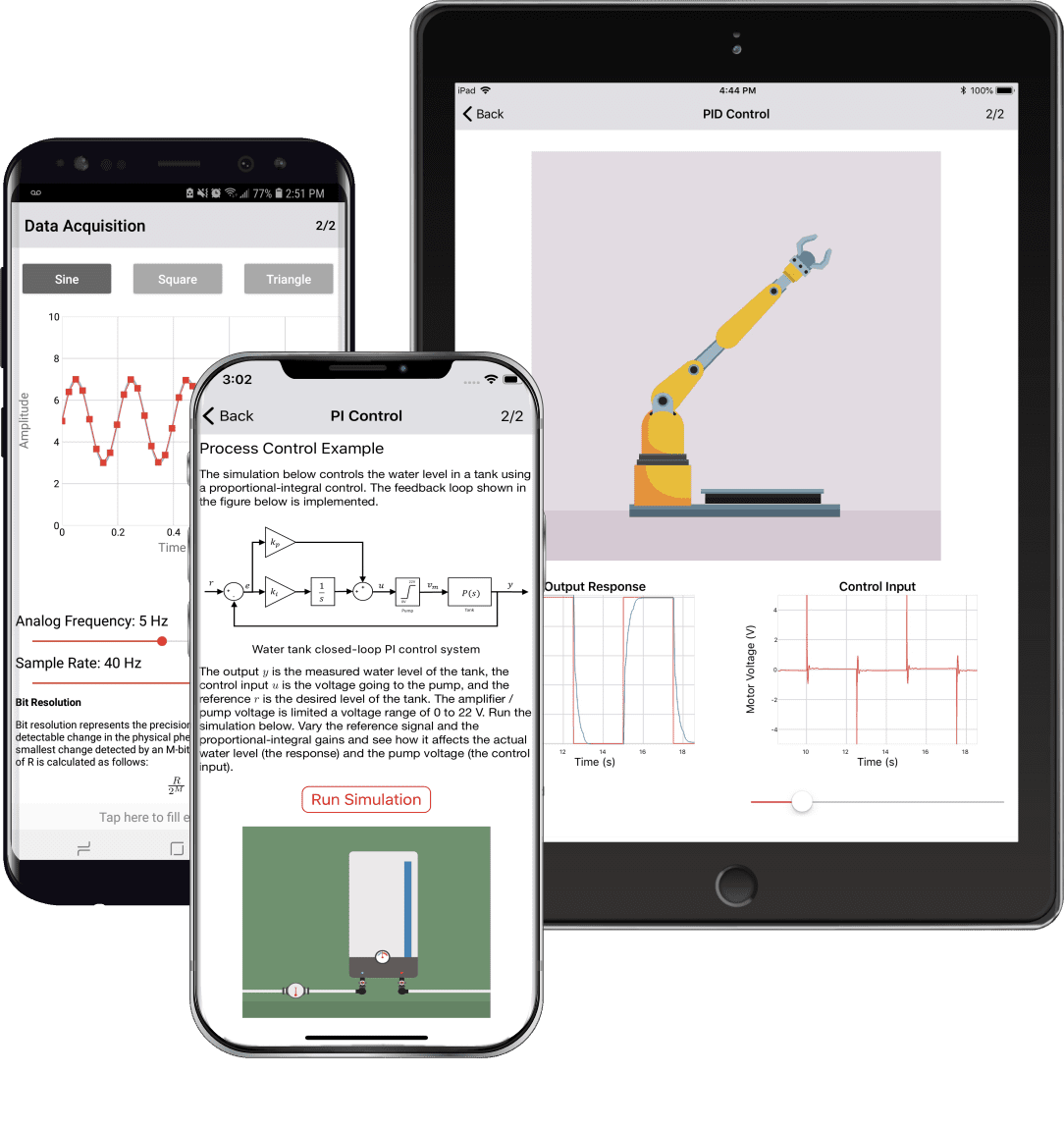
QLabs Controls is a collection of virtual laboratory activities that supplement traditional or online control systems courses. The virtual hardware labs are based on Quanser QUBE-Servo 2 and Quanser AERO systems which allows you to combine physical and virtual plants to enrich lectures and in-lab activities and increases engagement and students’ learning outcomes in class-based or online courses.
- Credible, academically appropriate experiences
- High-fidelity, interactive virtual lab experimentation
- Available on Windows, macOS, iOS, and Android
- Comprehensive curriculum including “check your understanding” and full assessment questions and lab reporting
- Instructor resources and tools to manage access and monitor students’progress
- Flexible 12-month subscription
- No IT infrastructure or resources required
| App download & access to subscription management | Quanser Academic Portal |
| App OS compatibility | Microsoft Windows 10 or later macOS Mojave 10.14.6 Android 5 or later – compatible with phones, tablets iOS 11.3 or later – compatible with iPhone, iPad, and iPod touch |
| Minimum system requirements | Video Card: Intel HD 520 or equivalent DX11 GPU Processor: Core i5-6300U series mobile CPU or equivalent Memory: 8 GB RAM |
| Recommended system requirements | Video Card: Intel UHD 620 or equivalent GPU Processor: Core i7-8665U series mobile CPU or equivalent Memory: 16 GB RAM |
QUBE-Servo 2 Modules
DC Motor
- Modelling:
– Experimental DC motor modelling
– First principles models vs real hardware
– Significance of the time constant and gain in a TF
– Non-linear behaviour in a DC motor - Position Control:
– Proportional position control
– Derivative control
– Theoretical and actual control implementation - Speed Control:
– Proportional speed control
– Steady state error
– Magic of integral gains
– Noise considerations
– Low-pass filtering and control considerations - Lead Control:
– Lead / lag compensator design
– Bode plots - Stability Analysis:
– Stable, marginally stable, and unstable systems
– Stability analysis from poles
– Bounded-Input Bounded-Output (BIBO) stability - Parameter Identification:
– Experimental identification of motor parameters
– Obtaining motor transfer function
– Unmodeled dynamics - Steady-State Error:
– Evaluating steady-state error due to step and ramp inputs
– System types
– Motor position control
– Proportional integral derivative (PID) control
Pendulum
- Moment of Inertia:
– Finding the moment of inertia - Pendulum Modelling:
– Modelling a rotary pendulum from first principles
– Linearization
– State-space modelling - Crane Control:
– State-feedback control
– Pole-placement
– Control design for higher-order systems - Pendulum Balance Control:
– Optimal control using linear quadratic regulator
– Bryson’s rule
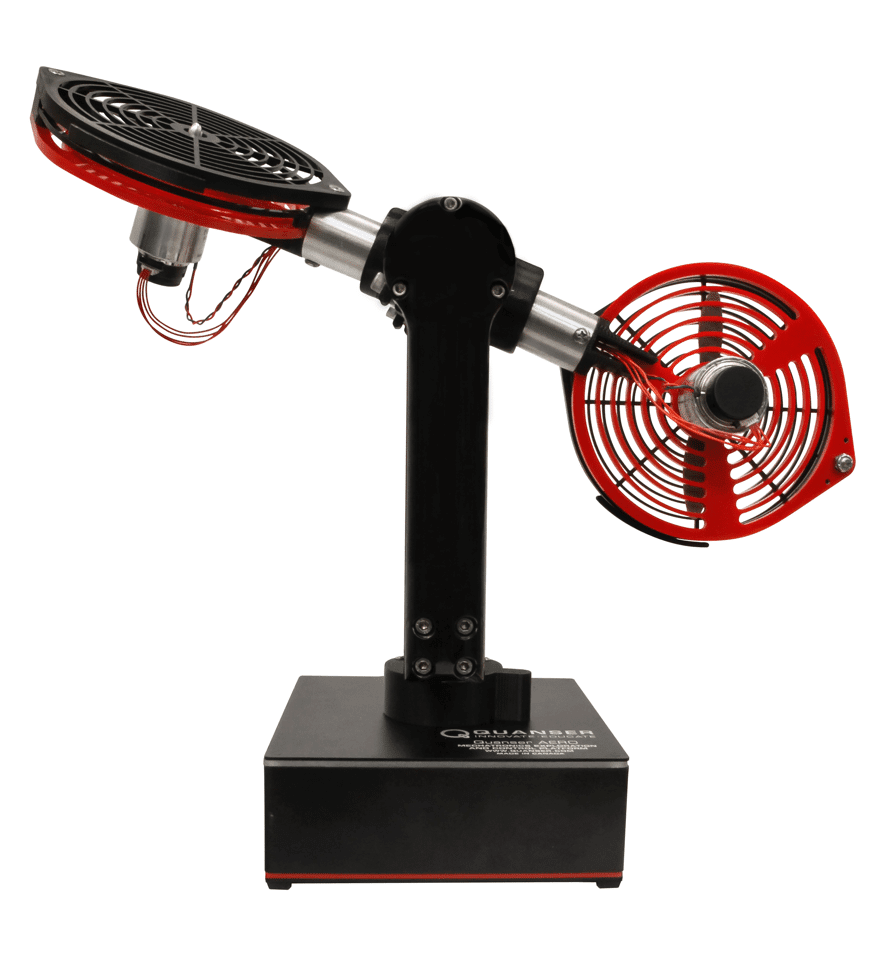
Quanser AERO Modules
- Qualitative PID Control:
– Qualitative PID tuning a simple aerospace system - Gain Scheduling:
– Non-linear dynamics
– Non-linear control
– Gain scheduling
– Integral wind-up - State-Feedback vs PID Control of a Helicopter:
– PID control of a complex coupled aerospace system
– State-space representation
– State feedback control - Optimal Control of a Half-Quadcopter:
– State-feedback control
– LQR design
– Bryson’s rule
For increased number of seats, customized curriculum or analytics tools, or to discuss your eLearning and remote teaching needs, contact sales@quanser.com
Related Products

Qube-Servo 2
THIS PRODUCT IS NO LONGER AVAILABLE.
Quanser AERO
THIS PRODUCT IS NO LONGER AVAILABLE.