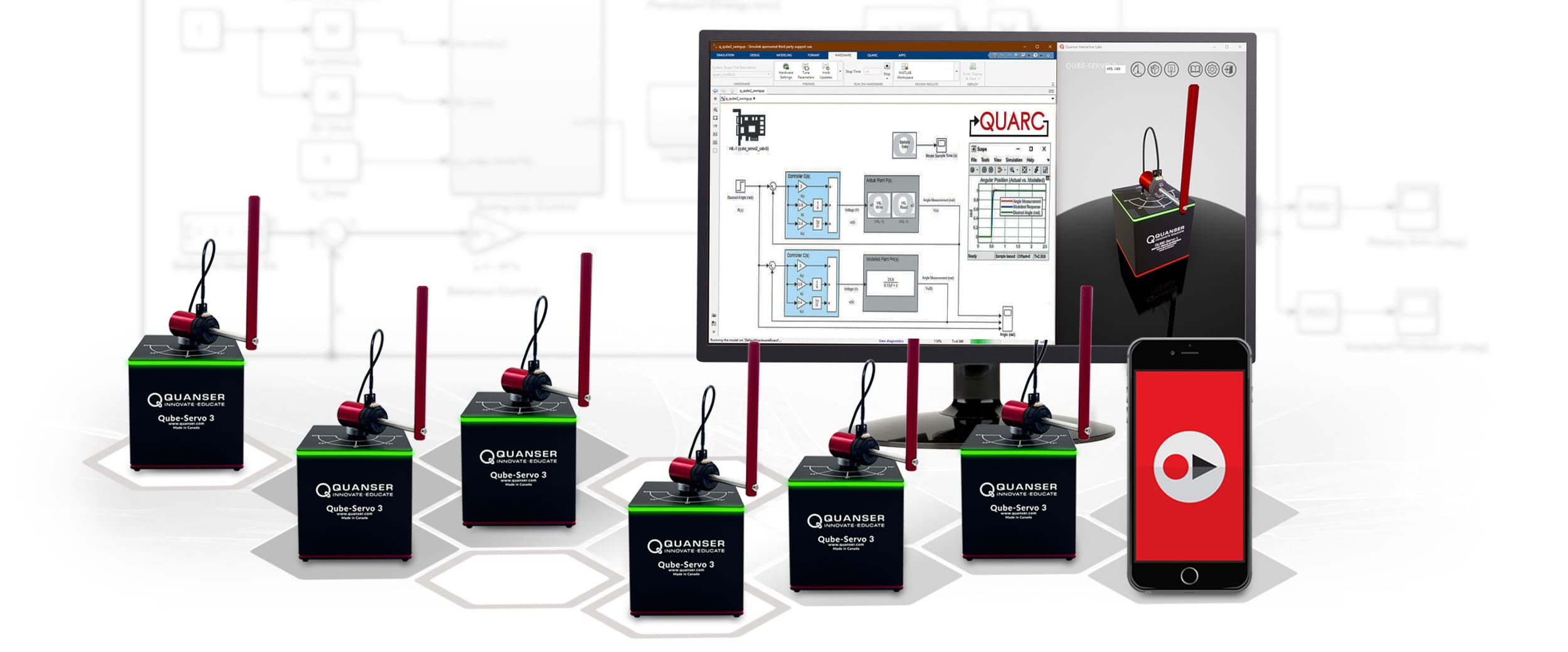
Using the MATHWORKS® Reinforcement Learning TOOLBOX™ to Balance the Quanser QUBE-Servo 2 Inverted Pendulum
This guide is meant as an introduction to those new to Reinforcement Learning (RL) for control system applications. It includes guidelines on how to tune the various RL parameters as well as results showing the RL in action on the QUBE-Servo 2 Inverted Pendulum hardware and virtual twin.
> Introduction to using Reinforcement Learning for control system applications from a model-based
design perspective.
> Complete example of how to balance an inverted pendulum using reinforcement learning.
> Gain insight into the challenges of designing RL and what guidelines were used to address them.
> Learn about how to use the Reinforcement Learning Toolbox in MATLAB and Simulink.
> See how RL can be implemented on actual hardware with Simulink.