
Over the years, Quanser has offered a wide range of aerospace control research platforms. The goal with these platforms, such as the 3DOF Heli experiment was always to provide a unique and repeatable dynamic system upon which new control systems could be tested and validated. However, we have seen increasing demand for more adaptable control systems as aerospace control design becomes more mainstream with the massive proliferation of low-cost drones in recent years. The Quanser Aero was developed to address this need for an adaptable control plant, especially one which could be used in undergraduate teaching as well as research. Recently we launched the successor to that product, the Aero 2, and we are excited to showcase its expanded capabilities in this area.
The Demo
We developed a demonstration of the Aero 2’s capability to serve as an abstract dynamic system, as well as how it can be integrated with other research platforms such as the QDrone.
An Alternative to DIY
In order to bring aerospace dynamic platforms to the benchtop, several of our customers have developed custom solutions in house. These solutions often require the development of a gimbal or protective cage to allow for safe operation. We even experimented in that area ourselves. However, we discovered that for many applications, the same outcomes could be achieved with a more abstract representation of the system. To this end, the Aero 2 has additional dynamic adjustability, including an easily adjusted center of mass. Testing and validating controllers against a variable dynamic system allows for confident development of prototype controllers for less safe applications such as live drone flight.
Aero 2 and Research Studios
Where we really see the Aero 2 standing out is when integrated with the Quanser Autonomous Vehicle Research Studio. By capturing and analyzing live flight data from the QDrone, including desired and measured system states and command signals, realistic flight data can be generated for use in a benchtop setting. This flight data can be used to provide undergraduate students working asynchronously with a benchtop system to experiment with control solutions in a safe environment. This integration could also be done in real-time using the QUARC Stream tools, meaning students could compare the performance of their controllers to the demands of live flight, as well as to their peers’ controllers subjected to identical commands.
The Big Picture
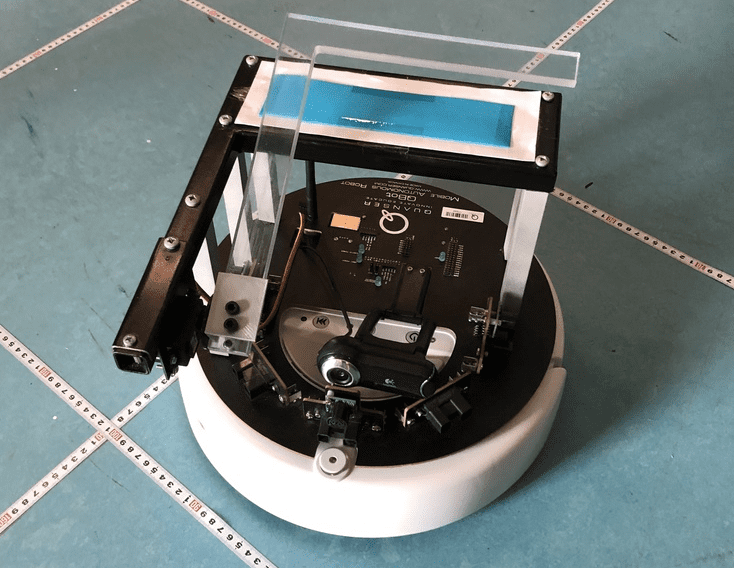
We envision the Aero 2 as part of a larger controls progression, starting from the Qube-Servo 2 and leading ultimately to swarmed autonomous vehicles. In this big picture if you only have room for a single solution, the Aero 2 covers the widest range of dynamic systems and applications. The Aero 2 can provide a dynamic representation of a wide range of control systems both as a stand-alone system as well as part of a larger solution like that shown above.