Working at Quanser for only a couple of months, so far, I have focused on my engineering projects and learning about the Quanser systems. A visit to our customers’ labs was, therefore, is a great opportunity for me to see the “other side” of the business. For the first time, I experienced the process of lab installation and customer training. I also learned about interesting research projects and applications.
Detecting Forest Fires with Drones
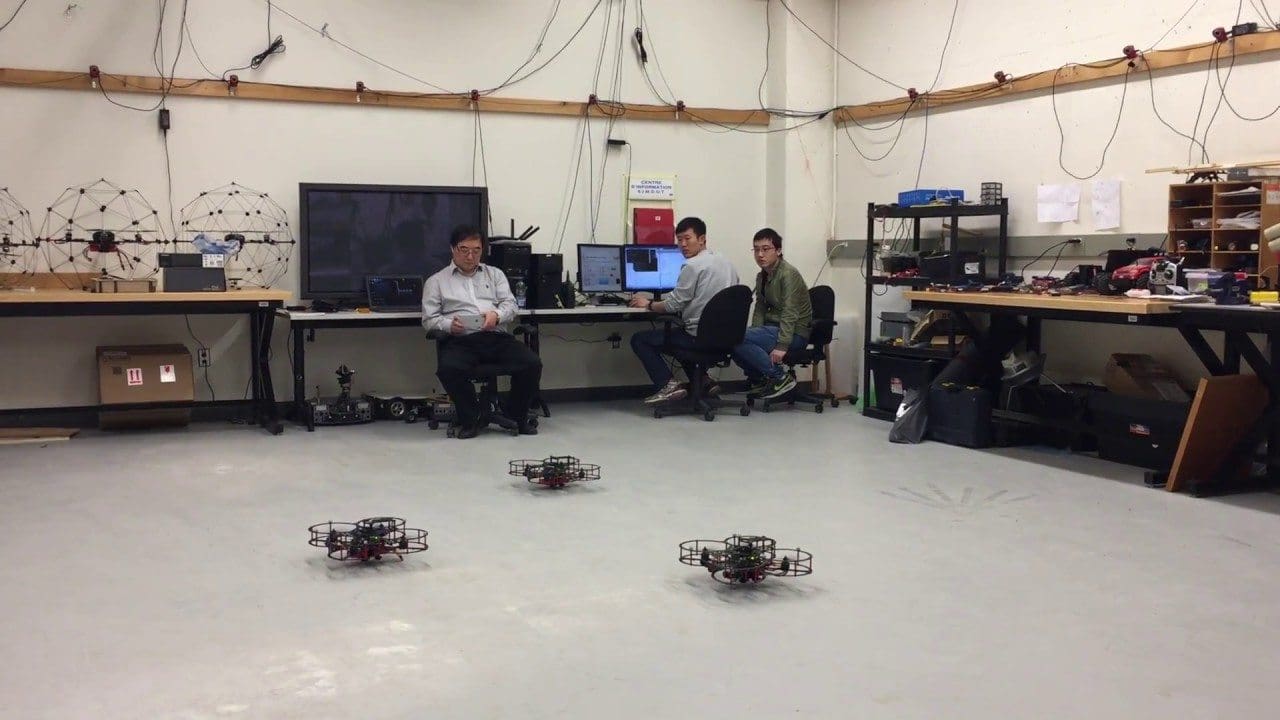
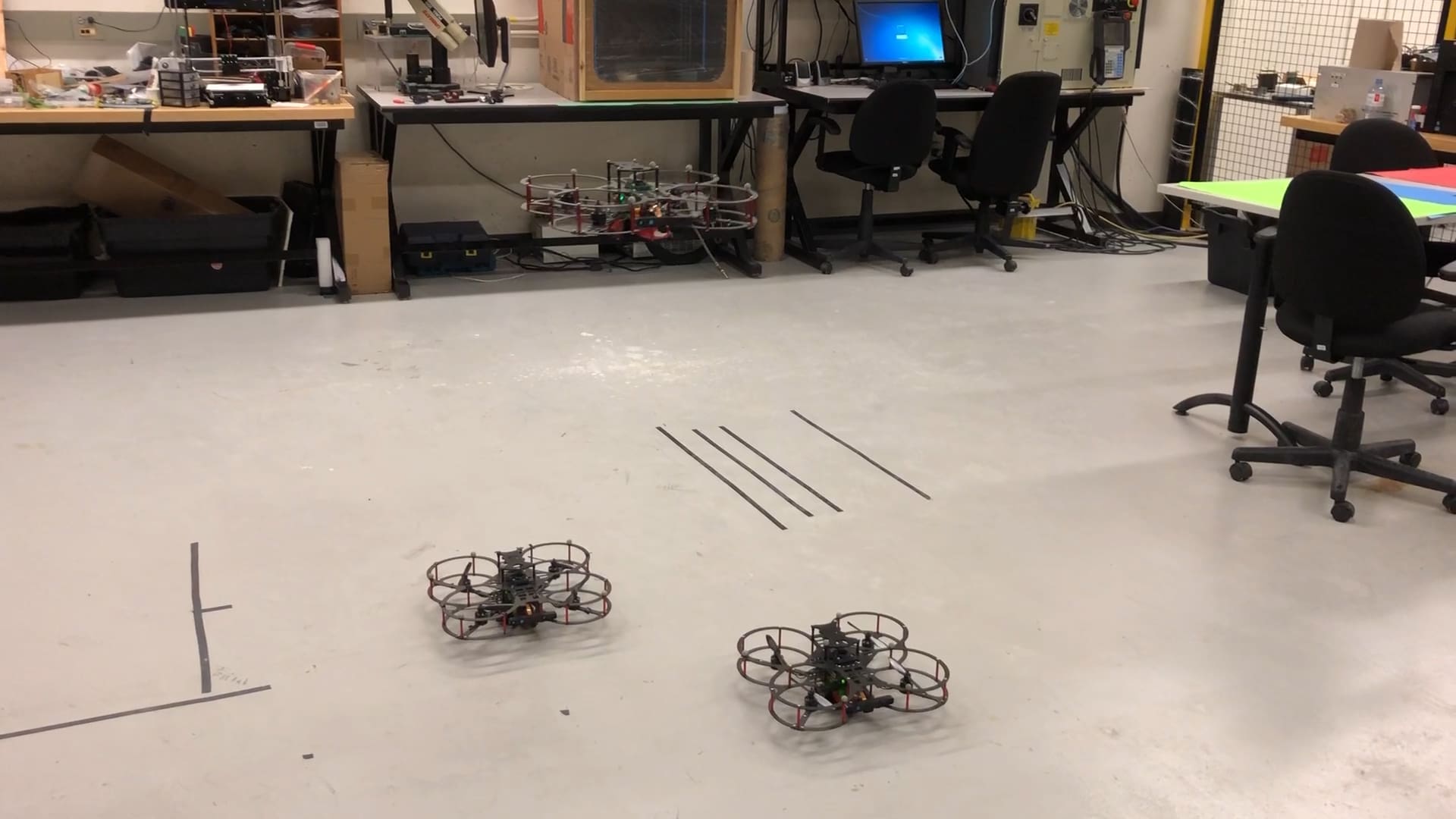
Our first stop was the lab of Dr. Youmin Zhang at Concordia University. Dr. Zhang and his students have published many papers using our products, including QBall quadrotors and other systems. This time, we met with his Ph.D. students who plan to use the QDrones (the QBall successors) to implement ideas on forest fire detection. With the fires devastating wast areas of Canada, California, or Australia, their early detection is becoming one of the hottest topics among the academics.
Talking to Anim Hossain, Linhan Qiao, and Yufei Fu, all Ph.D. students in the Networked Autonomous Vehicles (Nav) Lab at Concordia, I got a good idea of how they are planning to use the QDrones to validate their research. With both forward and downward facing high-resolution cameras, the QDrone is an ideal UAV for the team to maximize the possibility of detecting the fire. In addition, since there is an inter-communication among QDrones when flying in a swarm, if one drone detects the fire location, the others will get an update on the fire location instantly. As Linhan said, “QDrone is a good product. Because of the integrity among QDrones, I’m not worrying about the setup before each experiment. The communication and model deployment can be handled easily.”
I also had a chance to discuss with Yufei and his research focused topic on the UAV fault tolerance. Since it is not easy or cost-effective to create a hardware fault on the drone, he wants to generate a faulting signal on the software side to mimic the actual fault on the hardware. Using QDrone Simulink models, he can create a wide range of different faulting signals.
What Happens to a Drone in a Wind Gust?
After the visit with Dr. Zhang’s team, we spent the second part of our trip at McGill University, in the lab of Dr. Jovan Nedic. Here, the team is interested in investigating the behaviour of UAVs when encountering a sudden wind gust.
While they can use a wind tunnel, clearly, it is easier to change the orientation of a UAV by tilting, rolling, and yawing than to change the actual wind tunnel to create different wind profiles. To do that, they added a 6 DOF Hexapod to the wind tunnel. Now, their UAV model can simply sit on the top of the motion platform.
We discussed their need to test different wind profiles. Initially, the team thought they would have to set one orientation and perform one test at a time, but we recommended generating a motion profile that the hexapod can run. By doing this, they can test as many wind profiles as they want in one experiment. This piece of advice will really help them reduce the setup time, and they are excited to get started and see the result. And so are we!
Visiting customers and talking to them about their teaching and research projects is a great way to learn about the Quanser systems for any new engineer. Now I appreciate the systems even more, seeing how they get used and how they help develop new and important technologies.