
As one of the founding members of the Quanser Digital Transformation (QDT) program, Queen’s University wanted to provide its students the opportunity to experience the most dynamic and realistic virtual lab technology found among Canadian universities. Integral to the program is Quanser Interactive Labs (QLabs), which is a scalable platform that delivers credible, academically appropriate, and high-fidelity lab experiences through interactions with virtual hardware. QLabs is based on Quanser physical plants and allows students to experience real-life engineering experiments from on or off-campus.

Taking advantage of this opportunity, Professor Majid Pahlevani and PhD student Shane Forbrigger from Queen’s ECE department were able to run the laboratory portion of their Linear Control System (ELEC 443) course virtually given the current pandemic. The course examines the modeling of linear systems and using feedback to improve their performance.
I decided to catch up with Shane to hear about his experience using QLabs this past Fall. Listen to the audio track or read through the transcript given below.
Audio Transcript
Michel Lévis (ML): As the teaching assistant (TA) for the course, you were in charge of implementing the first virtual control systems lab at Queen’s University. What were your initial thoughts at the time?
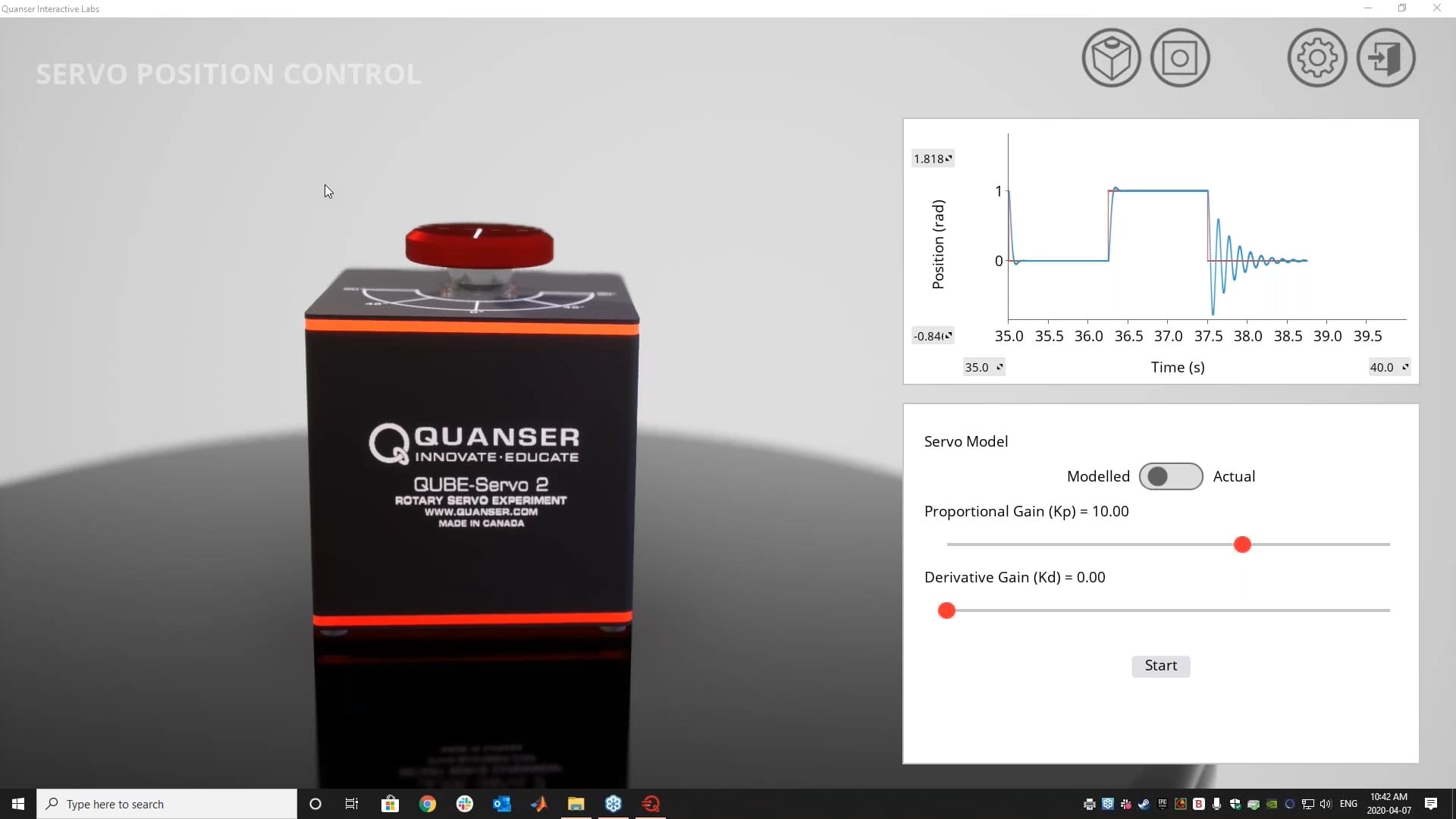
Shane Forbrigger (SF): Yeah, so I got introduced to our plan over the summer, a couple months before we began the course and, at the time, I was kind of concerned about how we’re going to do our labs since at that point we had decided we wouldn’t be doing in person labs, so we knew that we were going to be facing a bit of a challenge on delivering kind of the same level of quality in the same content to students when they wouldn’t be able to come into the university. So when I started working with the Quanser software for doing the virtual labs, it was good. I was pleased to see that we could have a virtual 3D rendering of the hardware and that the hardware itself was, the nonlinearities and the non-ideal sensor behavior was modeled really well. So it was definitely a relief to see that we could give the students kind of a similar experience what they would get in the lab. That was sort of my initial thoughts as we started to implement this for the students.
ML: How was your experience in setting up QLabs for the students?
SF: It was pretty easy. I found that especially for the Windows users. It was very straightforward; the Quanser portal I found was really easy to use. It was not that difficult to get a list of student emails and uploaded and have everyone added to the license. So that was super quick and easy.
It was a little more challenging for the students on the Mac since we didn’t have software for them. We looked at a couple different solutions to help those students do the lab. In the end we settled on using a remote server, so we had a computer on campus running the necessary software that they could remotely access. With a little sort of initial hiccup, after that we were doing pretty well. And the students, for the most part, already had MATLAB® and Simulink® installed on their computers, so it wasn’t that hard to get them to just install one additional software and start running the labs.
ML: Okay. Great. Thanks for that. That’s interesting, that’s good feedback. We do have actually, just to let you know, that now – we do have software that does run on a Mac OS but it’s the stand-alone software called QLabs Controls and QLabs Control Classic. But, of course, [in] the MATLAB/Simulink alternative we know that some other schools have used that alternative of remote windows logon with some success, so thanks for sharing that.
ML: How did you setup the lab? Are the students working from home on their laptop or do they have remote access?
SF: Yeah, so we were mostly trying to get students to run it at home on their own hardware and that worked for the vast majority of students. There was a very small subset of people who were running either very old hardware or those users on Mac’s who had trouble. In terms of old hardware, I actually have to say that Quanser software itself is quite lightweight and I’m very impressed by that. It is easy to run on its own. It’s MATLAB itself that requires a bit more heft. So that was something that we found for the students who would have trouble running MATLAB on their own hardware, that was tricky for them. And that was where having remote access for the students where they wouldn’t have to rely on their local hardware as much was very helpful. But for the vast majority of students, they could just run it on their own computers. So that was very easy for us.
ML: You modified the current lab manuals that were based on the Quanser hardware to the virtual systems. Was it difficult to do?
SF: No, it wasn’t really that difficult. This semester, we had a new instructor on the course, so there was some kind of rejigging that was independent of moving over to the virtual labs. But the process of going from the physical hardware to the virtual hardware from the instructions side it was quite easy, it was just a matter of replacing, you know, instead of “turn on your power supply” it would be “open up the app” and that sort of thing. So very easy to incorporate into our instructions.
Where things were a little bit more work involved was that we already have a lot of pre-generated solutions and, again, while the models are very realistic and I really have to say I was impressed with how good they did things like the non-linearity of the system. Because it’s a simulation, there’s going to be way less noise than in a real world system. So we had to adjust our solution manual somewhat just to make it look more like what the students were going to see, as opposed to our original solution manuals [that] were messy as hardware solutions tend to be. But other than that it was quite straightforward.
ML: How was the student experience? Do you feel this helped them gain some practical insight with control systems?
SF: Yeah, I think that it was a really great way of delivering the labs, given the environment that we were in and the fact that we had students working from their homes. Having that 3D rendering of the hardware is really important to include that visual aspect to the student’s labs. In our course, we really have a focus, as I think most controls courses would, on translating in the labs the things that they learned in lecture to the real-world application of those ideas and showing them how things get messy once you leave the classroom. You have to start dealing with the realism of the systems, you have to start dealing with non-ideal behavior. So I think that having that visual component and having as well that really like well-constructed models of the systems, that was really important for their learning and things would have been really difficult for us to pull off if we had tried to make some in-house solution like making our own simulations.
We wouldn’t have been able to make something that was so high fidelity as well giving the students the ability to see their controllers in action. I think it gives them a lot more insight into what they’re doing compared to just seeing the plot appear on screen and watching a little line move. Especially for things like the ball and bean model, which I really liked, it was good for them to be able to see the motion of the beam and be able to relate that to the physics and the dynamics in the kinematics of that situation. Especially since that simulation or that experiment in particular we try to get them to dig into understanding the underlying complexity of that system and the simplifications we make to create, it’s a linear controls course, so we linearize everything. So getting them to understand the subtleties of going from the more much more complex and nonlinear system to a linearized model and where that breaks down and how that breaks down is really important for their learning and I think that accomplished it pretty well.
The only thing I would say is that sometimes the students needed to be prompted to watch what the 3D model was doing. Since in the end of the day their solutions or the answers that they’re giving to us are in the form of plots, they tend to get laser focused in on like I just need to get a good-looking plot. So prompting them to watch what was happening on the virtual hardware and think more about that was really important. Like in the physical labs, it’s almost impossible to ignore what’s happening to your hardware because it’s sitting right next to me [and] because it’s making a lot of noise. So, with the virtual hardware it was more important to kind of nudge them and say “Hey look at what’s happening, look at how this is moving”, which I think is a really good insight that we wouldn’t have been able to do if all they could see was lines on a plot.
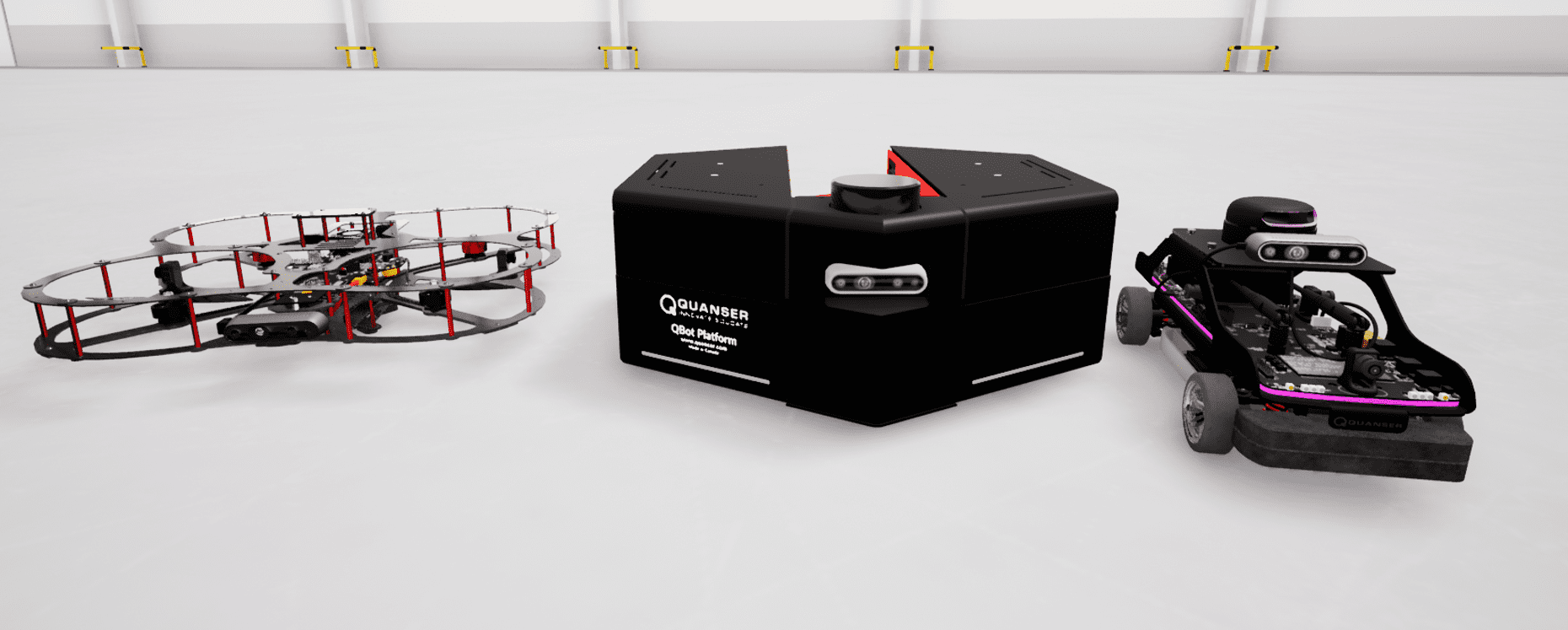
ML: The ELEC 448 Introduction to Robotics course taught by Prof. Hashtrudi-Zaad will be using the Quanser Rotary Flexible Link and QArm Virtual Plants. I understand you will be the TA for that course as well. Are you looking forward to using these different virtual systems?
SF: Yeah, I am looking forward to that. I think, again, it will be very helpful for the students in that course to be able to see the robots in action and to be able to implement that in a way that doesn’t differ too much from the way we run the labs in the past. Since we don’t have a ton of time to rejig our whole course material and Keyvan, Professor Hashtrudi-Zaad, definitely has a way that he likes things to be run. So I am looking forward to using the new models of the QArm and the Flexible Link. Yeah, so we’re looking forward to using both of those new models.
ML: Well that’s great. So we are looking forward to you using those, and once again we will always touch base with you to get your feedback and see how things are going. So Shane I’d like to thank you for your time today this is very helpful and I think it’ll be helpful for other instructors and teaching assistants that want to gain some perspective of how you’ve used this. Thanks a lot we appreciate your time.
SF: You’re very welcome.
Acknowledgements: The author would like to thank Arman Molki and Gemma Wang for their significant contributions to this blog.