
2 DOF Serial Flexible Link

This product is no longer available.
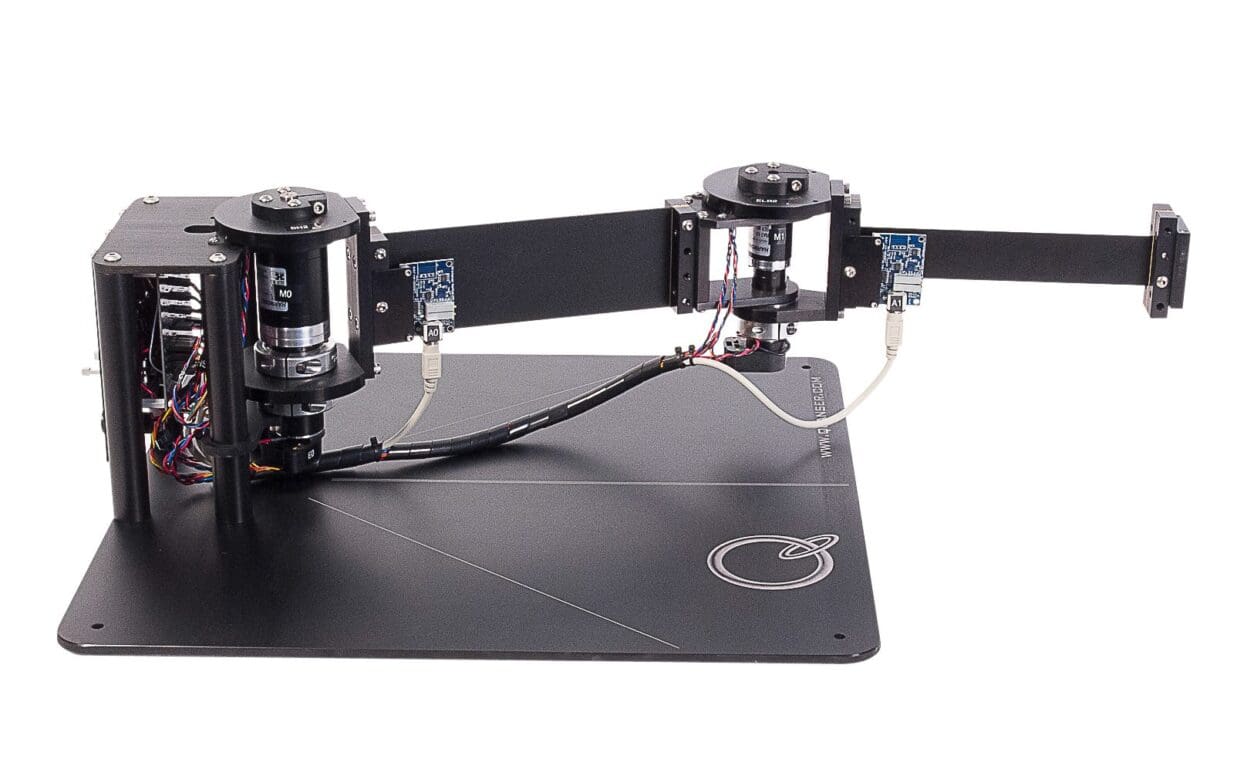
The 2DOF Serial Flexible Link is a simplified model of a robotic arm in which the links are designed as to exhibit visible harmonics during accelerations, while flexure in the joints is negligible.
Product Details
This experimental system consists of two DC motors each driving harmonic gearboxes and two serial linkages. The primary link attached to the first motor is flexible and is instrumented with a strain gage sensor. It carries at its end the second motor to which the second flexible link is attached, again instrumented with a strain gage sensor. Both motors are further instrumented with high-resolution optical encoders. The Multi-Input Multi-Output (MIMO) system is supplied with a decoupled state-feedback controller reducing flexibility-caused oscillations as well as link-coupling effects.
- Fully compatible with LabVIEW and MATLAB/Simulink
- High-resolution encoders and strain gages to sense link deflection
- Open architecture design for maximum flexibility
| Plant dimensions (L x W x H) | 50.8 cm x 50.8 cm x 22.5 cm |
| 2 DOF Flexible Link total length | 77.5 cm |
| Maximum displacement – Axis 1 | ± 90 deg |
| Maximum displacement – Axis 2 | ± 90 deg |
| Encoder sensitivity (quadrature) – Axis 1 | 1.534 x 10-5 rad/count |
| Encoder sensitivity (quadrature) – Axis 2 | 1.918 x 10-5 rad/count |
| Maximum continuous torque – Axis 1 | 8.6 N.m |
| Maximum continuous torque – Axis 2 | 1.7 N.m |
| Maximum additional payload | 0.5 kg |
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Quanser AMPAQ-L2 linear current amplifier
- One of the following DAQ devices:
- Quanser Q8-USB
- Quanser QPIDe
Group Citation: Fundamental Control
Related Products

2 DOF Robot
Introduce fundamental principles of robotics
