
2 DOF Robot

Introduce fundamental principles of robotics
The 2 DOF Robot module is ideal to introduce students to the fundamental and intermediate principles of robotics. You can use it to demonstrate real-world control challenges, such as pick-and-place robots used in manufacturing lines.
The 2 DOF Robot module attaches to two Rotary Servo Base Units. Using this experiment, students learn concepts such as forward and inverse kinematics and workspace control.

Gallery


Product Details
The 2 DOF Robot module is connected to two Rotary Servo Base Units, which are mounted at a fixed distance. Two servomotors on the Rotary Servo Base Units are mounted at a fixed distance and control a 4-bar linkage system: two powered arms coupled through two non-powered arms. The system is planar and has two actuated and three unactuated revolute joints.
The goal of the 2 DOF Robot experiment is to manipulate the X-Y position of a four-bar linkage end effector. Such a system is similar to the kinematic problems encountered in the control of other parallel mechanisms that have singularities.
- 2 DOF Robot module easily attaches to the Rotary Servo Base Unit
- 4-bar precision-crafted aluminum linkage system
- Allows for mounting of the 2 DOF Inverted Pendulum module for additional experiments (sold separately)
| 2 DOF Robot Overall Dimensions* (L x W x H) | 40 cm x 30 cm x 20cm |
| 2 DOF Robot Total Mass* | 4.0 kg |
| Mass of 4-Bar Linkage Module | 0.335 kg |
| Mass of Single Link | 0.065 kg |
| Length of Link | 0.127 m |
| Link Moment of Inertia About Cog | 8.74 x 10-5 kg.m² |
| Link Moment of Inertia About Pivot | 4.41 x 10-4 kg.m² |
| *2 DOF Robot module mounted on the Rotary Servo Base Unit | |
Modeling Topics
- Transfer function representation
- Kinematics
Control Topics
- PD
The following additional components are required to complete your workstation, and are sold separately:
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Two Rotary Servo Base Units
- Quanser VoltPAQ-X2 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Two Rotary Servo Base Units
- Quanser VoltPAQ-X2 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with two Quanser Q1-cRIO modules
- NI myRIO with Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
Related Community Resources

Related Products

Rotary Servo Base Unit
Foundational modular control experiment

Qube-Servo 2
THIS PRODUCT IS NO LONGER AVAILABLE.

Rotary Inverted Pendulum
A classic modeling and control systems experiment
Rotary Flexible Link
Control and vibration analysis of flexible links

Rotary Flexible Joint
Modeling flexible joints in robotic arms

Rotary Double Inverted Pendulum
Take the classic inverted pendulum challenge to the next level

Multi-DOF Torsion
Multi-dimensional system for torsional dynamics

Gyro/Stable Platform
Introduce rotational dynamics concepts
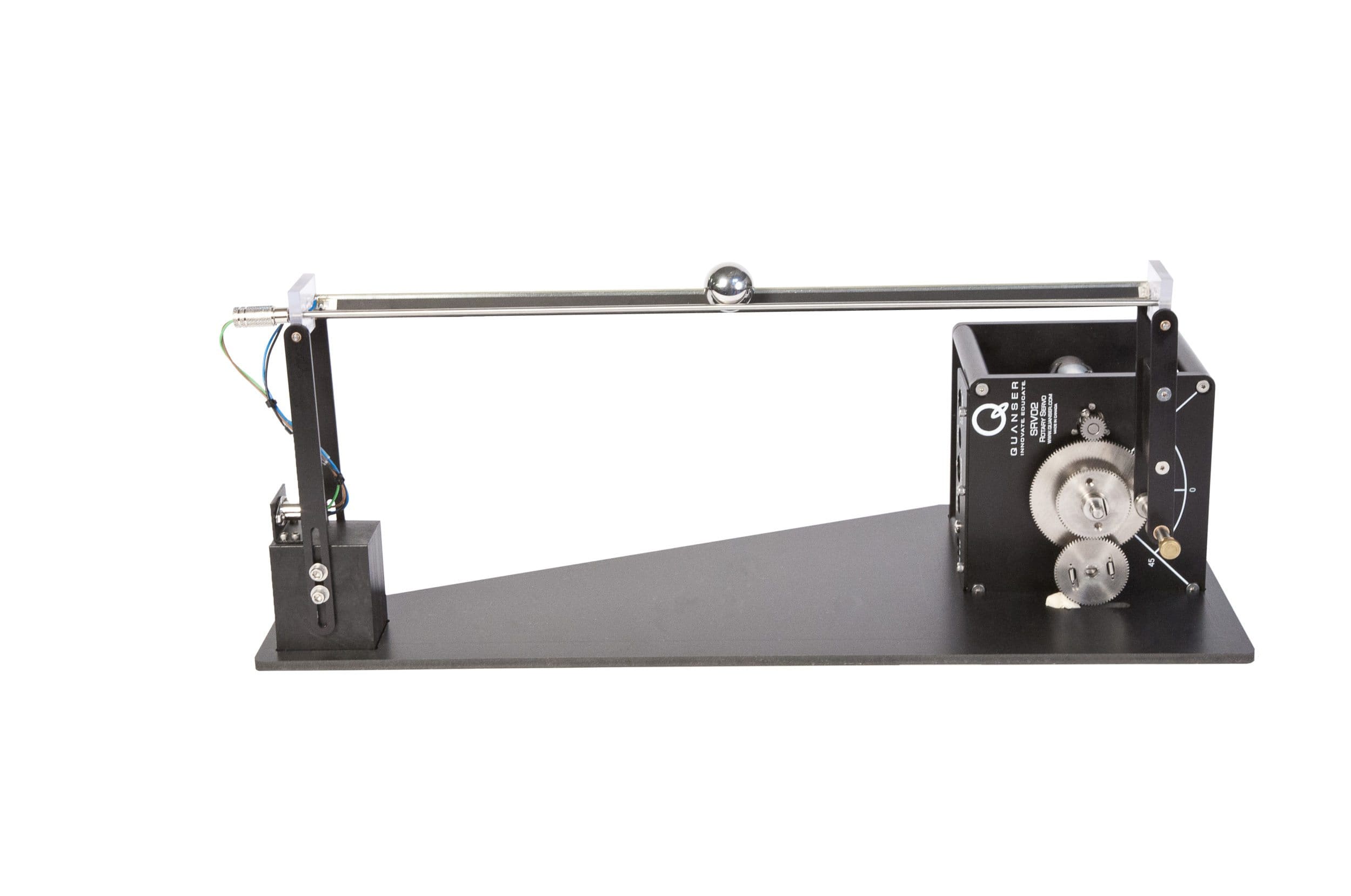
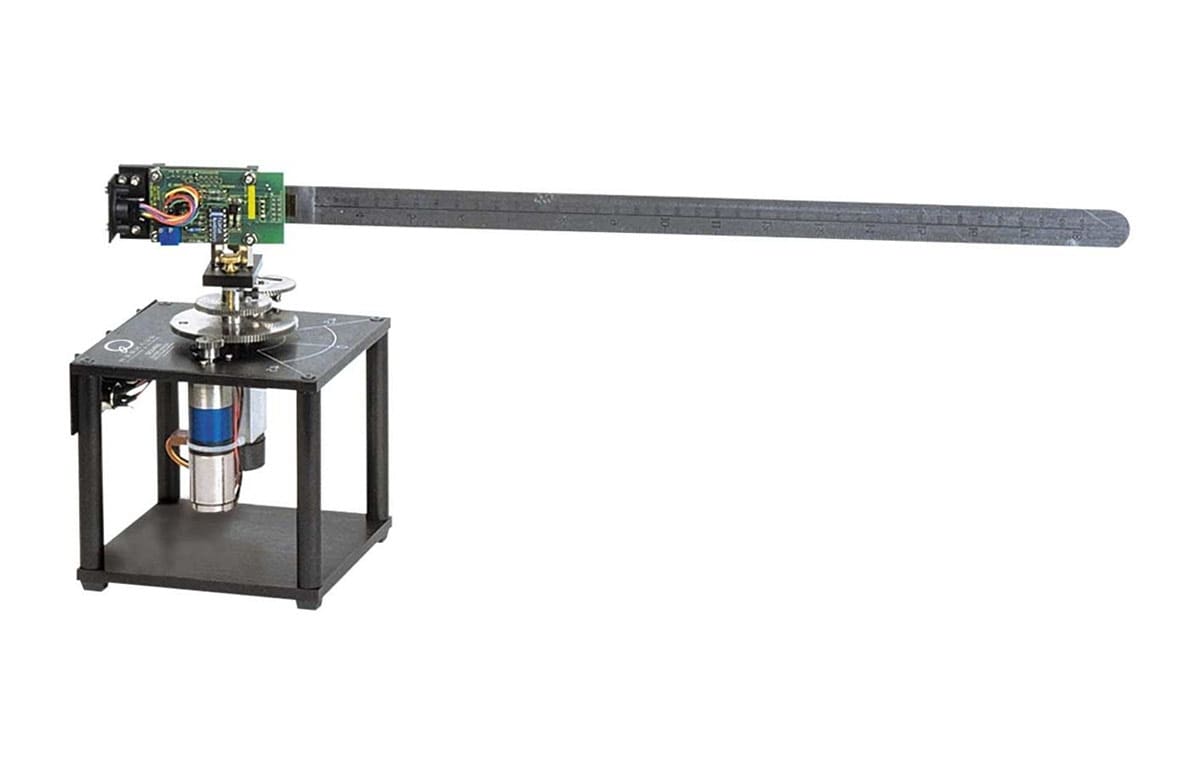
Ball and Beam
Introduce unstable closed loop system control concepts

2 DOF Inverted Pendulum/Gantry
Introduce advanced principles of robotics
