
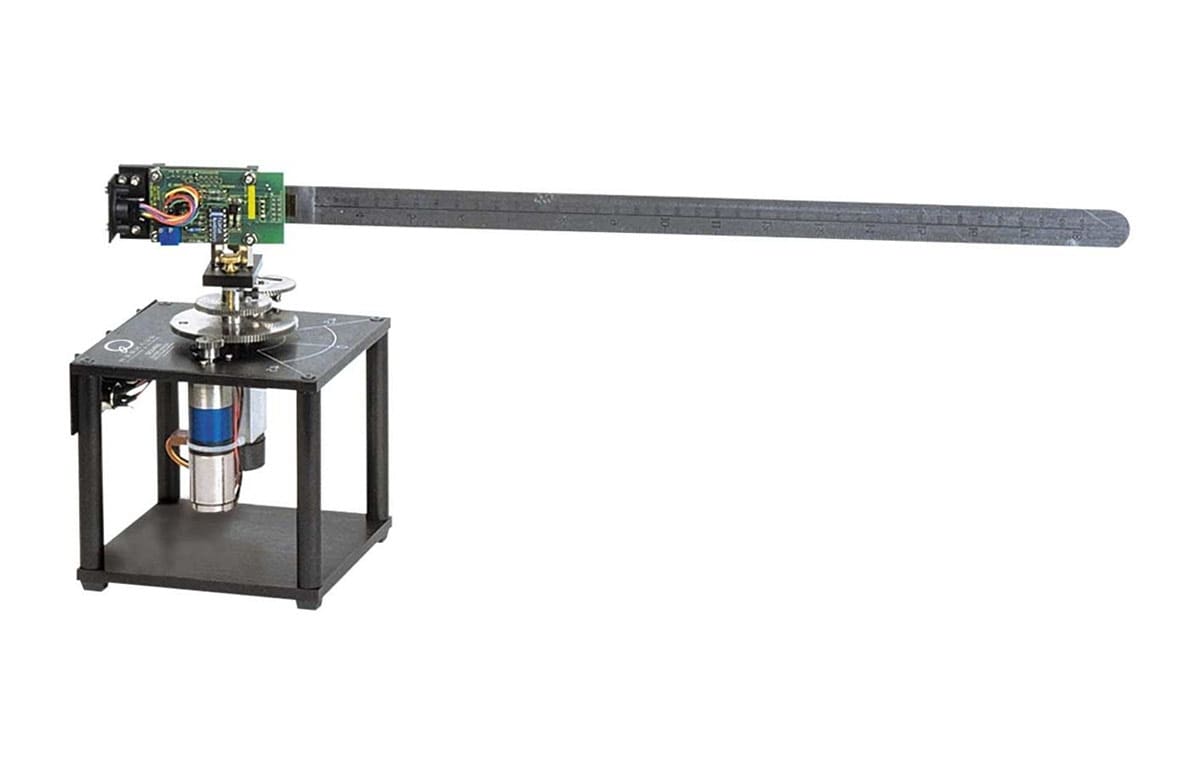
Gyro/Stable Platform

Introduce rotational dynamics concepts
The Gyro/Stable Platform module is ideal to introduce rotational dynamics principles. You can use it to demonstrate real-world control challenges such as those encountered in control and guidance of sea vessels, aircraft and submarines or in satellite navigation.
The Gyro/Stable Platform module attaches to the Rotary Servo Base Unit.

Gallery

Product Details
The module consists of a rotating disk mounted inside a frame. The disk is actuated about its center through a DC motor. An internal frame holds the rotating disk and is attached to an external frame through two shafts at both ends. A gear mechanism is connected between one of these end shafts and an encoder measures the angle of the blue frame as it rotates about the shafts, i.e., it measures the disc tilt angle. The Rotary Servo Base Unit is mounted on a 2-plate structure and is free to rotate. This allows the gyroscope structure to be manually rotated relative to a fixed surface in order to simulate external disturbance to the gyroscope system.
- Gyro/Stable Platform module easily attaches to the Rotary Servo Base Unit
- Rotary Servo Base Unit mounted on a rotatable two-plate structure to simulate disturbance
- Large inertial disc is actuated by a DC motor
- High-resolution encoder measures the disc tilt angle
| Motor Current-Torque Constant | 0.02 N.m/A |
| Motor Armature Resistance | 5.3 Ω |
| Motor Armature Inductance | 0.580 mH |
| Motor Nominal Input Voltage | 12 V |
| Armature Inertia | 1.4 x 10-6 kg.m² |
| Operating Current | 0.23 A |
| Flywheel Radius | 0.0508 m |
| Flywheel Mass | 0.8 kg |
| Flywheel Inertia About Spin Axis | 1.0323 kg.m² |
| Gyro Module Inertia About Input Axis | 0.002 kg.m² |
| Spring Stiffness | 1.9089 x 10³ N/m |
Modeling Topics
- First-principles derivation
- Transfer function representation
Control Topics
- Observer design
- PID
The following additional components are required to complete your workstation, and are sold separately:
Rotary Servo Base Unit with Gyro/Stable Platform module
Quanser VoltPAQ-X1
MATLAB Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Quanser Q2-USB, Q8-USB, QPID/QPIDe
LabVIEW
- Rapid Control Prototyping (RCP) Toolkit® add-on for NI LabVIEW™
- NI CompactRIO with Quanser Q1-cRIO or
- NI myRIO with Quanser myRIO Terminal Board
For Simulink
- QUARC® add-on for MATLAB®/Simulink®
- Rotary Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
For LabVIEW
- Quanser Rapid Control Prototyping (Q-RCP) Toolkit® add-on for NI LabVIEW™
- Rotary Servo Base Unit
- Quanser VoltPAQ-X1 linear voltage amplifier
- One of the following DAQ devices:
- NI CompactRIO with Quanser Q1-cRIO
- NI myRIO with Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
Group Citation: Aerospace
Explore more: All Research Paper
Related Products
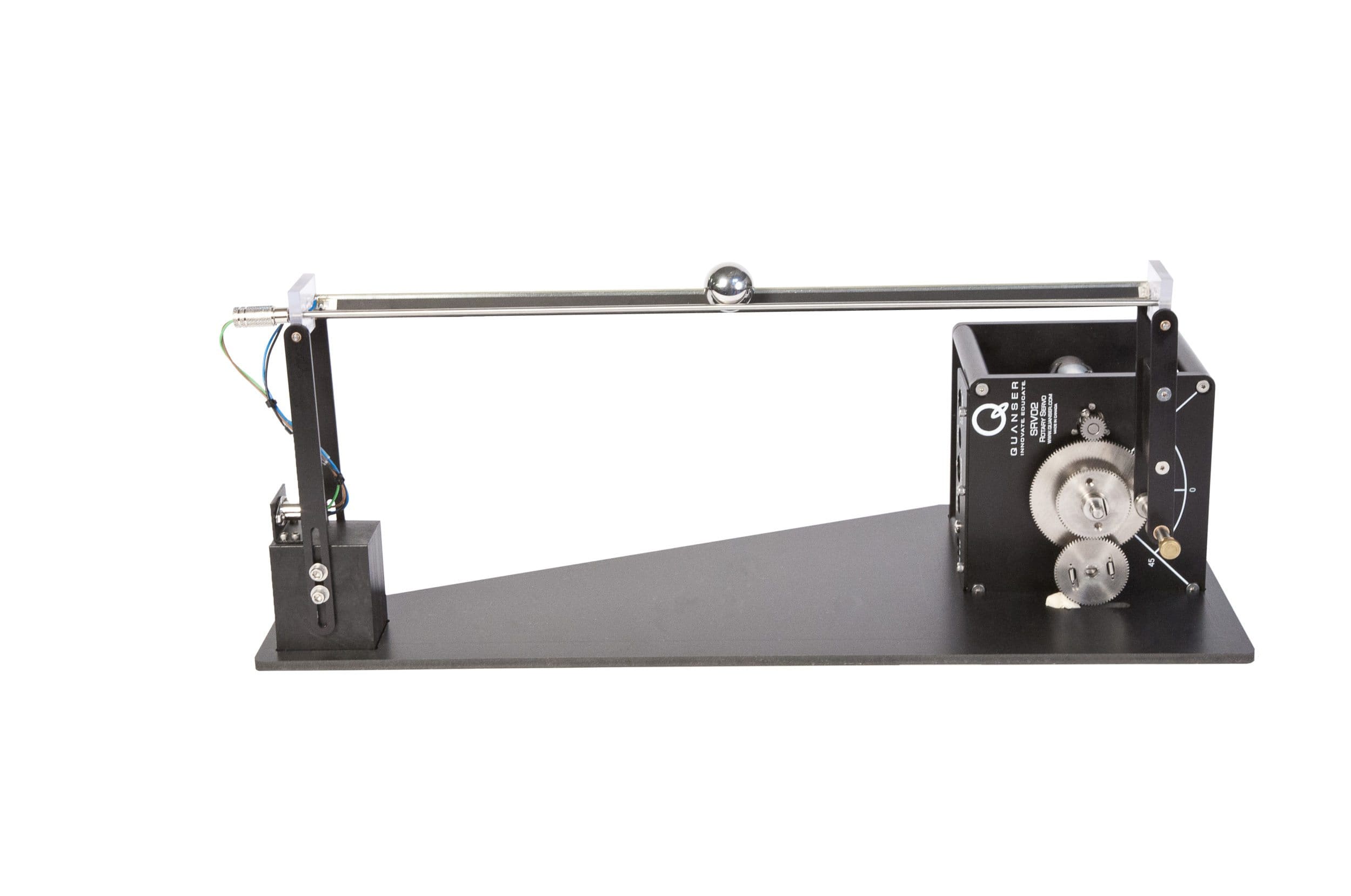
Ball and Beam
Introduce unstable closed loop system control concepts

2 DOF Robot
Introduce fundamental principles of robotics

2 DOF Inverted Pendulum/Gantry
Introduce advanced principles of robotics

2 DOF Ball Balancer
Introduce vision-based control concepts using the servo family

Multi-DOF Torsion
Multi-dimensional system for torsional dynamics

Qube-Servo 2
THIS PRODUCT IS NO LONGER AVAILABLE.

Rotary Double Inverted Pendulum
Take the classic inverted pendulum challenge to the next level

Rotary Flexible Joint
Modeling flexible joints in robotic arms
Rotary Flexible Link
Control and vibration analysis of flexible links

Rotary Inverted Pendulum
A classic modeling and control systems experiment
