QLabs Virtual QCar 2

Safely develop and validate your self-driving algorithms in virtual worlds
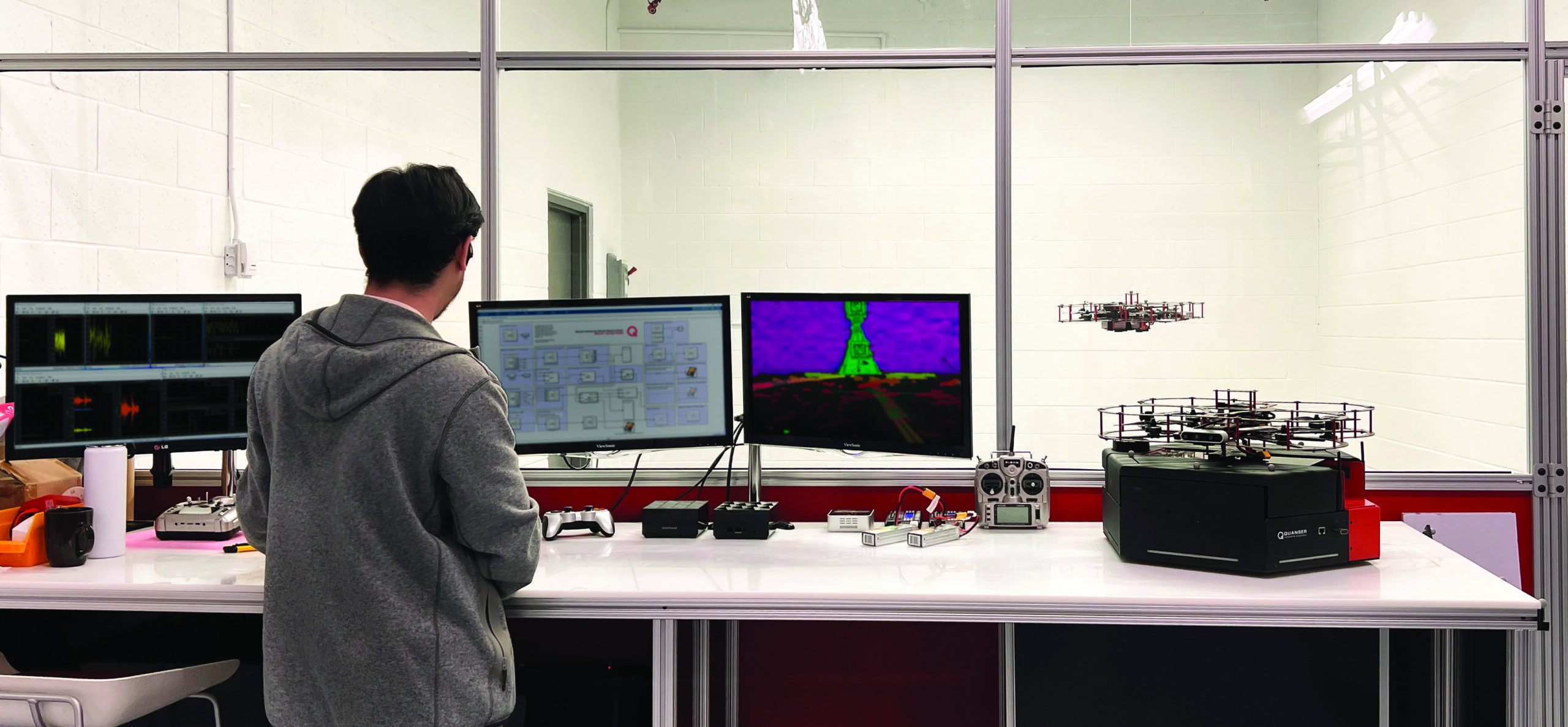
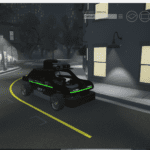
The Quanser Virtual QCar 2 is a fully instrumented, dynamically accurate digital twin of the physical QCar 2 1/10 scale self-driving car. It behaves the same way as the physical hardware and can be measured and controlled using MATLAB Simulink® or Python development environments. It can enrich your lectures and activities in traditional labs, or bring credible, authentic model-based lab experiences into your distance and online self-driving courses.
Same as the physical Qcar, the virtual system is a self-driving teaching and research platform complete with industrially relevant sensors such as LiDAR, 360° CSI cameras, an RGB-D camera, and inertial and odometric sensors.
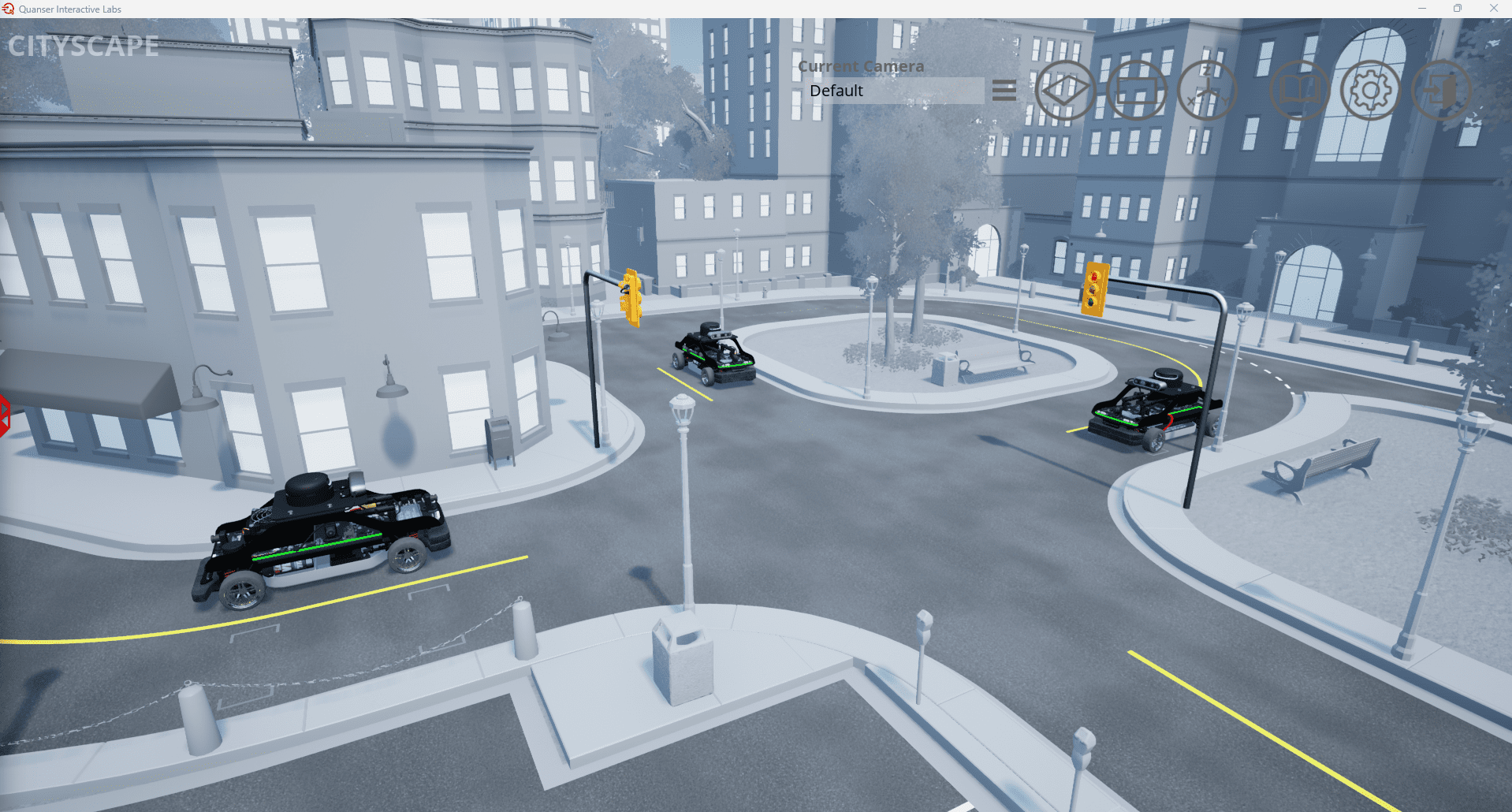
Gallery
Product Details
The Quanser Virtual QCar 2 is a fully instrumented, dynamically accurate digital twin of the physical QCar 2 1/10 scale self-driving car. It behaves the same way as the physical hardware and can be measured and controlled using MATLAB Simulink® or Python development environments. It can enrich your lectures and activities in traditional labs, or bring credible, authentic model-based lab experiences into your distance and online self-driving courses.
Same as the physical Qcar, the virtual system is a self-driving teaching and research platform complete with industrially relevant sensors such as LiDAR, 360° CSI cameras, an RGB-D camera, and inertial and odometric sensors.
Academically appropriate
High-fidelity, credible lab experiences equivalent to using the physical lab equipment
Comprehensive Resources
Innovative curriculum and research resources
Open Access
Full access to the system through MATLAB Simulink® or PythonTM
Scalable
12-month multi-seat subscription
| CSI Cameras | 4×160° FOV @820×410 resolution @30Hz |
| 2D LiDAR | 360° 384 points per scan @15Hz |
| RealSense RGB-D Camera | RGB and Depth @640×480 resolution @30Hz |
| IMU | 3-axis gyroscope and accelerometer |
| Minimum Specifications | Intel Core Ultra 5, Intel Core i5, Ryzen 5 |
| 8GB RAM | |
| Intel Iris or Arc integrated GPU | |
| Recommended Specifications | Intel Core Ultra 7, Intel Core i7, Ryzen 7 |
| 16GB RAM | |
| Intel Arc integrated GPU, or discrete GPU (e.g. NVIDIA GeForce RTX 3050) | |
| Recommended Research Specifications | Intel Core Ultra 7, Intel Core i7, Ryzen 7 |
| 32GB RAM | |
| Discrete GPU (e.g. NVIDIA GeForce RTX 3050) |
- Sensor interfacing and kinematic modeling
- Occupancy grid mapping
- Sensor fusion
- Vehicle lateral and longitudinal control
- Image acquisition and camera interfacing
- Line detection
- Lane detection and keeping
- Object detection and classification
Group Citation: Software
Explore more: All Research Paper


Related Products

Self-Driving Car Lab
A Complete Turnkey Ecosystem that Accelerates Research, Enhances Teaching, and Engages Students from Recruitment through Graduation.

QCar 2
Sensor-rich autonomous vehicle for self-driving applications.