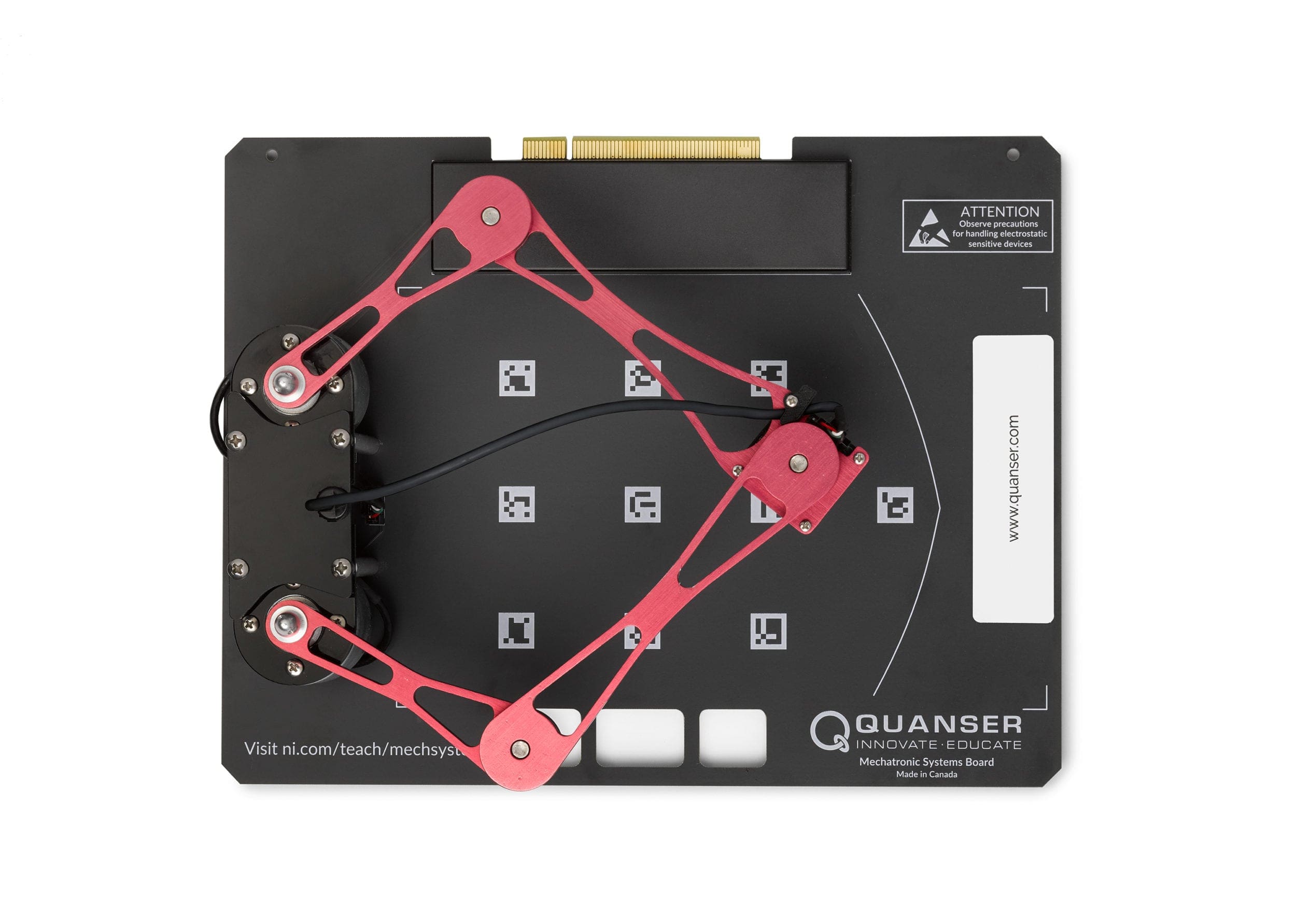
QNET Mechatronic Actuators Board

THIS PRODUCT IS NO LONGER AVAILABLE.
Click for more information on Mechatronic Actuators Trainer.
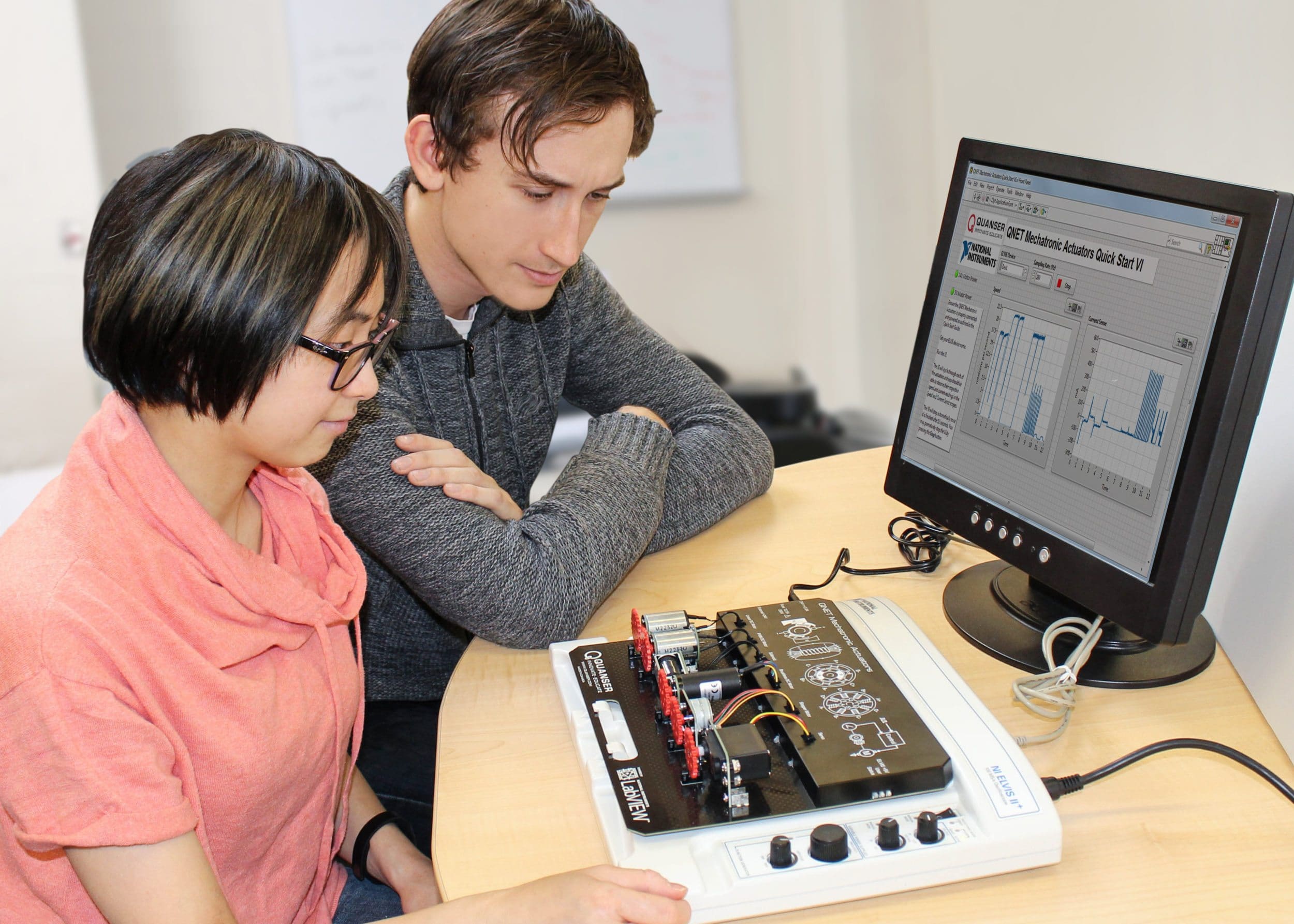
One of the topics covered in a typical introductory mechatronics course is understanding and application of actuators commonly used in modern mechatronic systems. The QNET Mechatronic Actuators board is an ideal tool to introduce hands-on a variety of actuators, and demonstrate their advantages, interfacing and operation, as well as design considerations and limitations. Designed exclusively for NI ELVIS platform and LabVIEW™ software, students learn principles of electromagnetic actuation, linear and PWM actuators, brushed and brushless DC motors, stepper motors and servos.
Gallery


Product Details
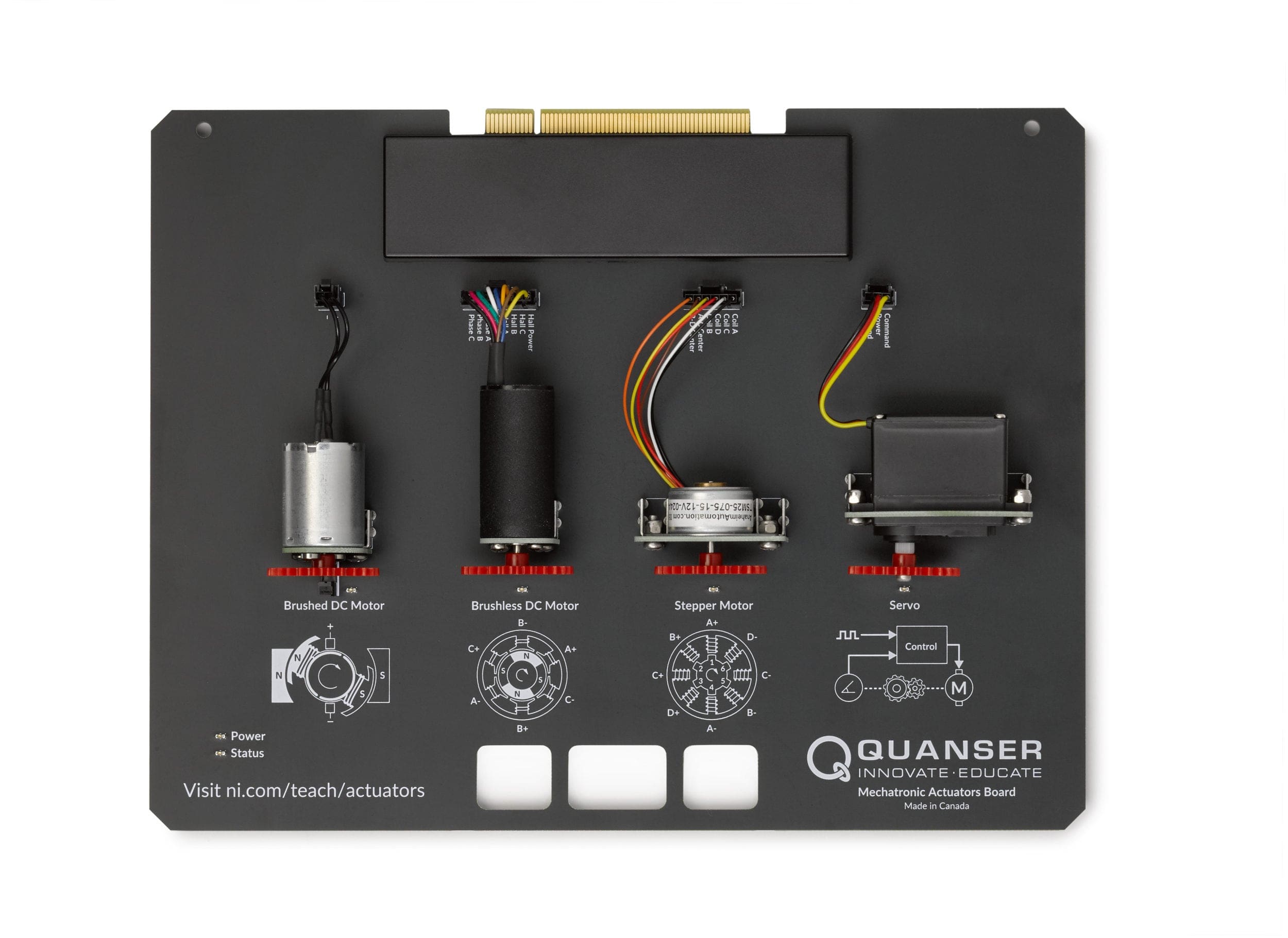
The QNET Mechatronic Actuators board consists of a solenoid, two brushed DC motors, a brushless DC motor, an unipolar stepper motor, and a servo motor. One of the brushed DC motors is commanded through a linear power amplifier, the other is commanded by a PWM amplifier. The solenoid can be used to couple the two brushed DC motors. The brushless DC motor, stepper motor and servo motor are driven by a PWM amplifier. Current sense is used to read the current supplied to each of the motors, the angular position of the motors is measured by photomicrosensors.
| Brushed DC motor nominal input voltage | 24 V |
| Brushed DC motor nominal speed | 8700 rpm |
| Brushless DC motor nominal input voltage | 24 V |
| Brushless DC motor nominal speed | 4600 rpm |
| Stepper motor nominal input voltage | 5 V |
| Stepper motor steps in revolution | 24 |
| Servo motor nominal operating voltage | 4.8 V – 6 V |
| Servo motor nominal speed (no load) | 0.19 s/60º (4.8 V) – 0.15 s/60º (6 V) |
| Solenoid nominal operating voltage | 6 V |
| Number of solenoid coil turns | 1080 |
| Photomicrosensor typical rising and falling time | 4 µs |
| Photomicrosensor line count per revolution | 24 |
- Principles of electromagnetic actuation
- Magnetic fields of coiled conductors
- Implementation of electromagnetic field theory in solenoids
- Principles of linear and pulse width modulation (PWM) amplifiers
- Actuator dead-band measurement and compensation
- Linearity of an amplifier
- Principles of brushed and brushless DC motors
- Principles of stepper motors, their control and excitation modes
- Introduction to servo motor position control
The following additional components are required to complete your workstation, and are sold separately:
For LabVIEW
- NI ELVIS II+
Group Citation: Mechatronics
Related Products

Analog Electronics Labs (for NI ELVIS II+)
THIS PRODUCT IS NO LONGER AVAILABLE.
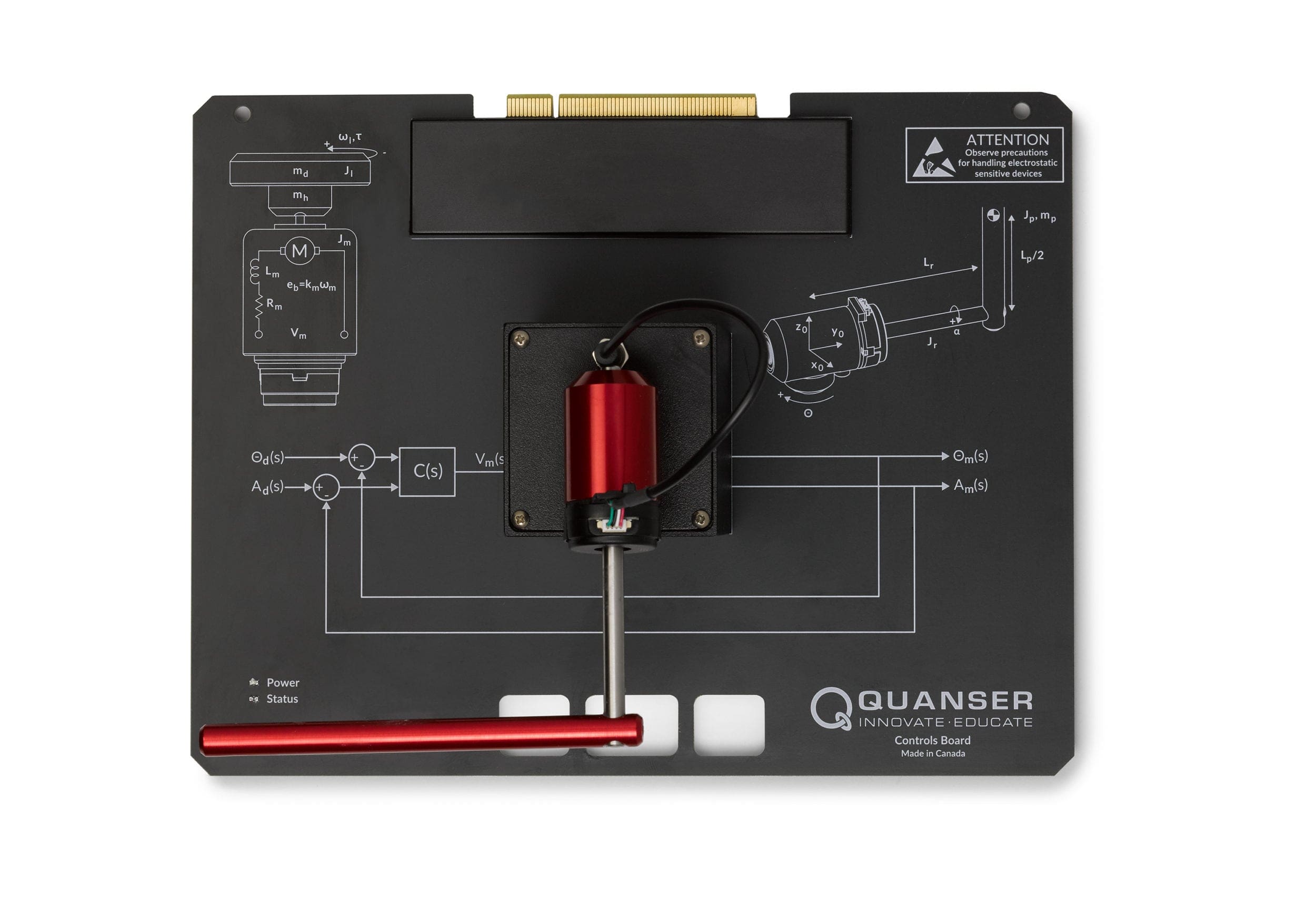
Quanser Controls Board
Investigate introductory and advanced controls
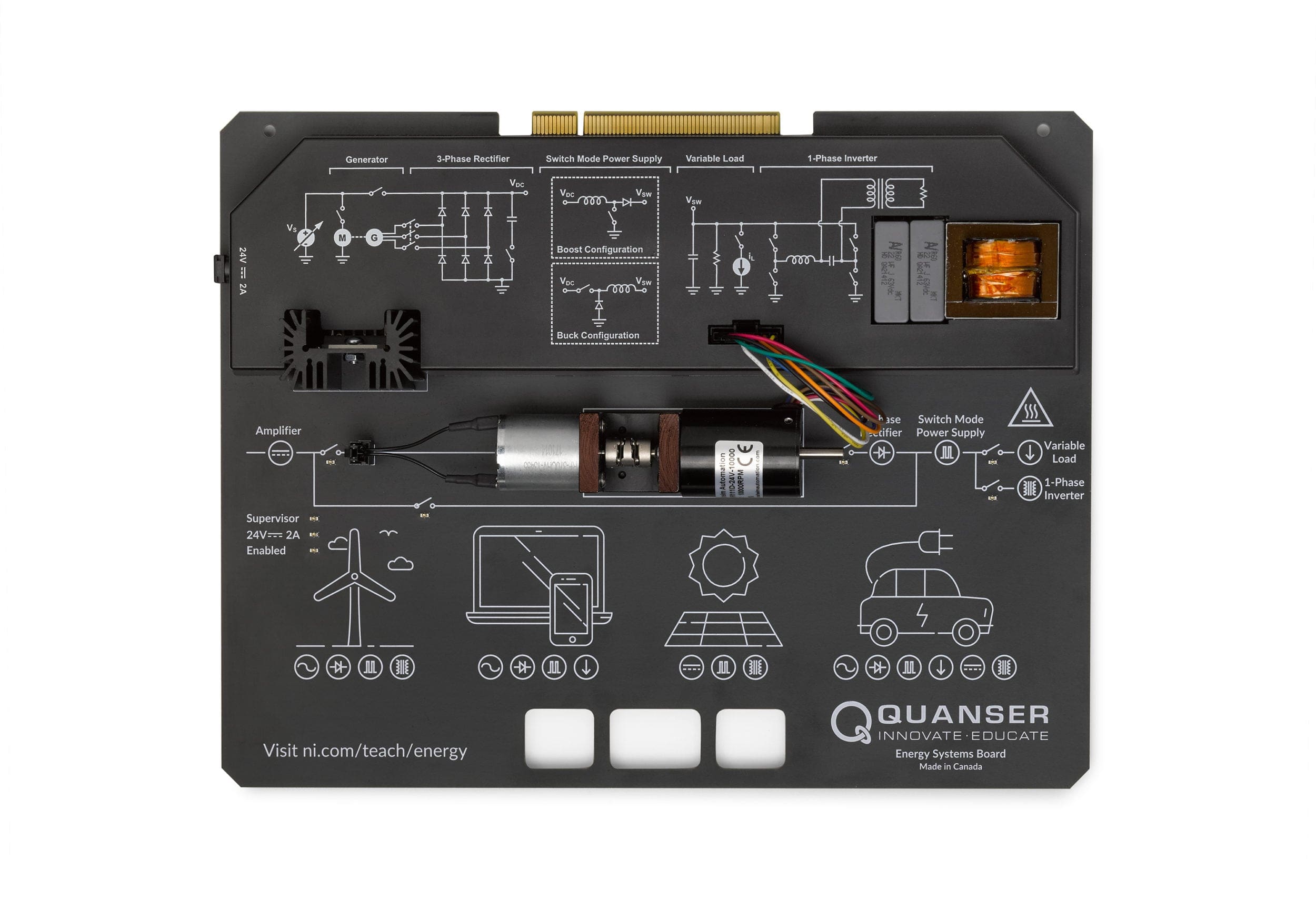
Quanser Energy Systems Board
THIS PRODUCT IS NO LONGER AVAILABLE.
Quanser Mechatronic Actuators Board
THIS PRODUCT IS NO LONGER AVAILABLE.

Quanser Mechatronic Sensors Board
THIS PRODUCT IS NO LONGER AVAILABLE.