QNET Mechatronic Systems Board

THIS PRODUCT IS NO LONGER AVAILABLE.
The QNET Mechatronic Systems board is a versatile system that combines various topics covered in typical mechatronics courses and programs, and applies them to a complex mechatronic system. The board is designed exclusively for the NI ELVIS platform, taking the full advantage of accurate timing and control of FPGA-based reconfigurable I/O brought by the new ELVIS RIO Control Module.
Product Details
The QNET Mechatronic Systems board is the only solution that takes students from component-level knowledge of sensors, actuators, and interfacing fundamentals to a system-level understanding of mechatronics design. Students investigate and implement various sub-components of a mechatronic system from manipulator control, to image processing, line-following, pattern recognition, PWM generation, encoder decoding, LabVIEW FPGA coding, and more. This exemplifies challenges they will encounter in a typical industry-level applications.
- 5 bar parallel SCARA robot
- Direct-drive brushed DC motors
- Built-in PWM amplifier for each motor
- Optical encoders
- Serial camera for embedded imaging applications
- Default map with dynamic LEDs and other elements for path planning tasks
- Template for map or other custom applications
| DC motor nominal input voltage | 18 V |
| DC motor nominal speed | 3050 RPM |
| DC motor nominal current | .054 A |
| Encoder line count | 512 lines/rev |
| Encoder resolution (in quadrature) | 0.176 deg/count |
| Amplifier type | PWM |
| Amplifier continuous current | 2.5 A |
| Amplifier nominal frequency | 20 kHz |
| Camera type | CMOS VGA serial camera |
| Image formats | JPEG and RAW |
| Image resolutions | 160 x 128 / 320 x 240 / 640 x 480 (in JPEG mode) 80 x 60 / 160 x 120 / 128 x 128 / 128 x 96 (in RAW mode) |
- Goal-directed line following
- Image processing
- Image tresholding
- Blob detection
- Pattern matching
- State machines
- Manipulator control
- PWM generation
- Encoder decoding
- Inverse kinematics
- Forward kinematics
- PID position control
The following additional components are required to complete your workstation, and are sold separately:
For LabVIEW
- NI ELVIS II+
- NI ELVIS RIO Control Module
Group Citation: Mechatronics
Related Products
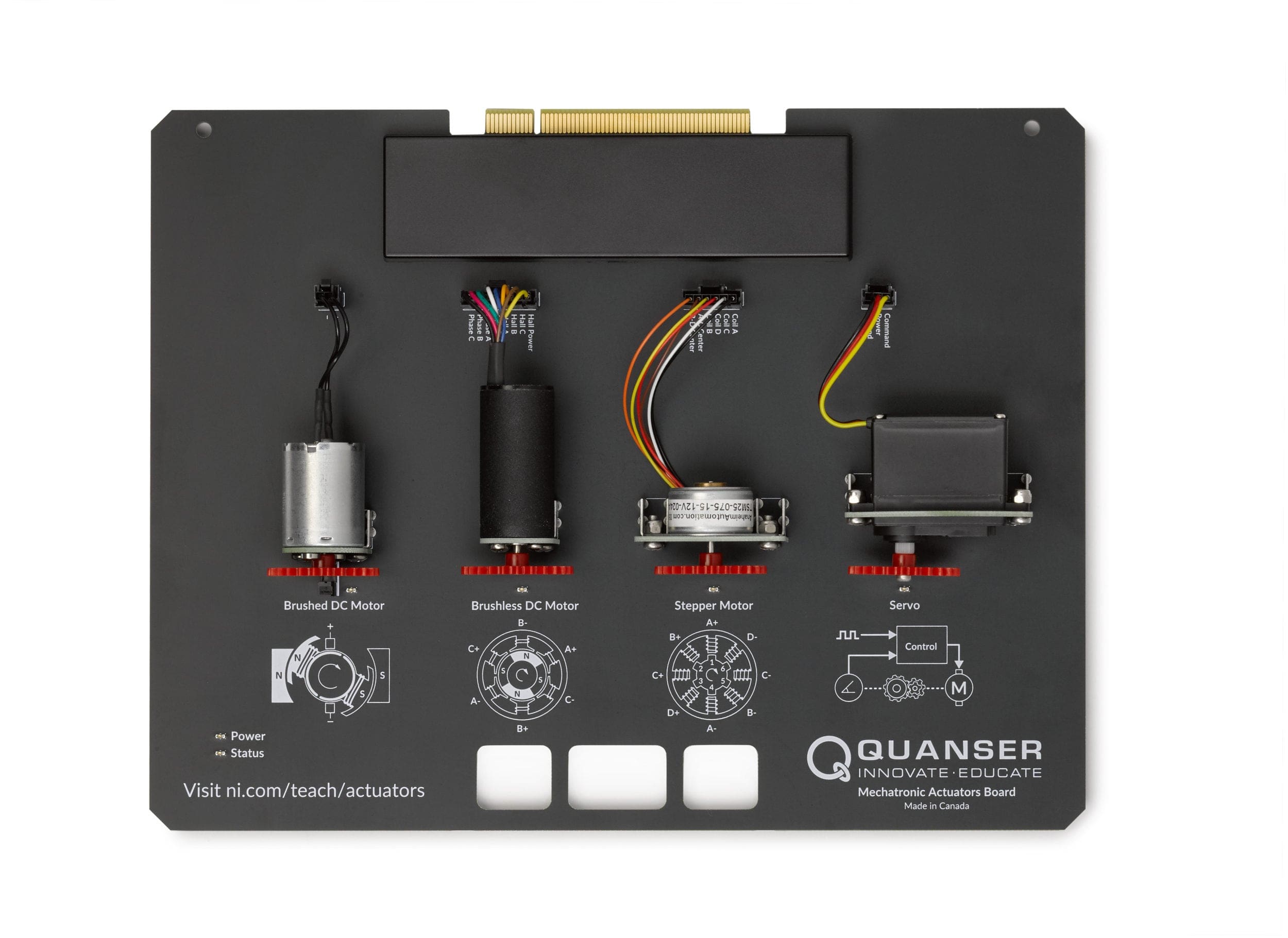
Quanser Mechatronic Actuators Board
THIS PRODUCT IS NO LONGER AVAILABLE.

Quanser Mechatronic Sensors Board
THIS PRODUCT IS NO LONGER AVAILABLE.

Analog Electronics Labs (for NI ELVIS II+)
THIS PRODUCT IS NO LONGER AVAILABLE.
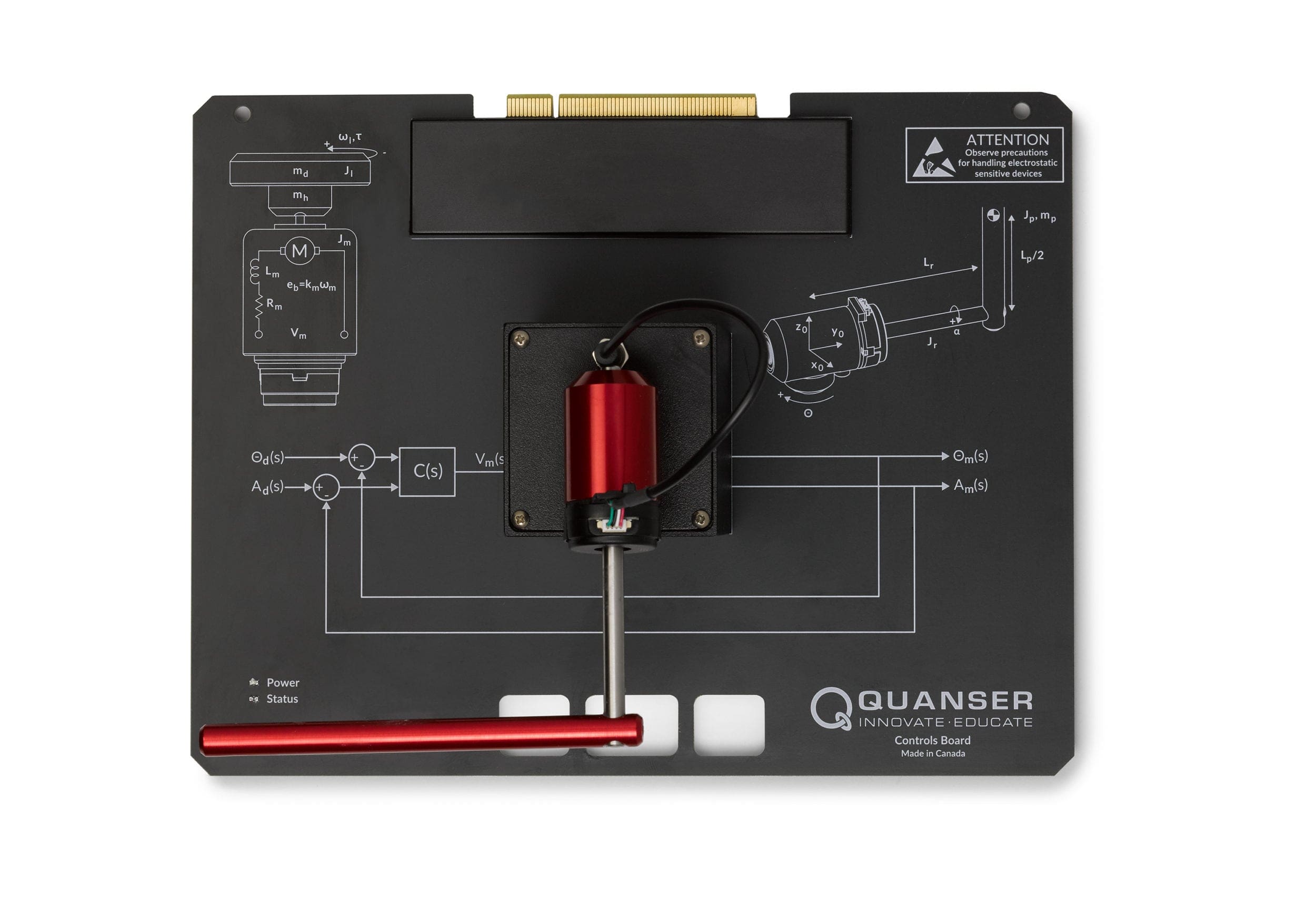
Quanser Controls Board
Investigate introductory and advanced controls