
The users of our systems are well-aware of QUARC, the real-time control software. It is truly the most efficient way to design, develop, deploy, and validate real-time applications on hardware using Simulink®. But even the most proficient users may not be aware of the capabilities hidden in QUARC libraries. And no wonder – there are more than 400 blocks in QUARC, each one with its specific function that can make your life easier, whether you are just learning controls or working on advanced image processing, AI, or machine learning applications.
We want to highlight some of the more and lesser-known QUARC blocks and show you how you can use them in your control design. Let’s start the QUARC Block Party with the HIL Read Other block!
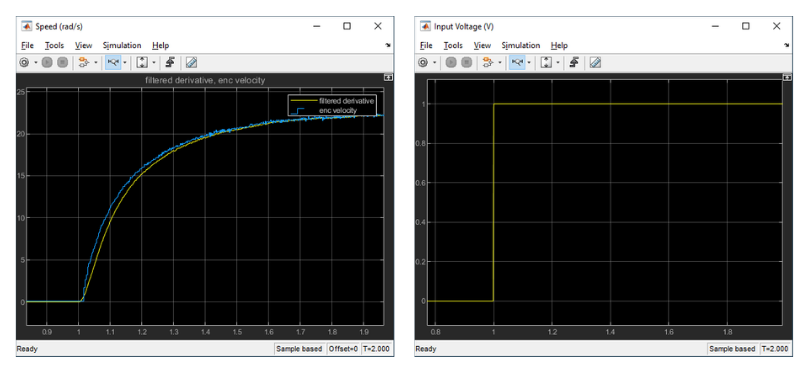
Encoder Velocity
Also known as a ‘digital tachometer’, certain Quanser data acquisition devices support hardware velocity measurements. This lets you measure the velocity directly from the encoder counts instead of, for instance, taking the derivative through software. As discussed in the QUARC documentation, these measurements are independent of the sample rate of the model and are unaffected by sample rate jitter. They reflect the instantaneous velocity of the encoder channel.
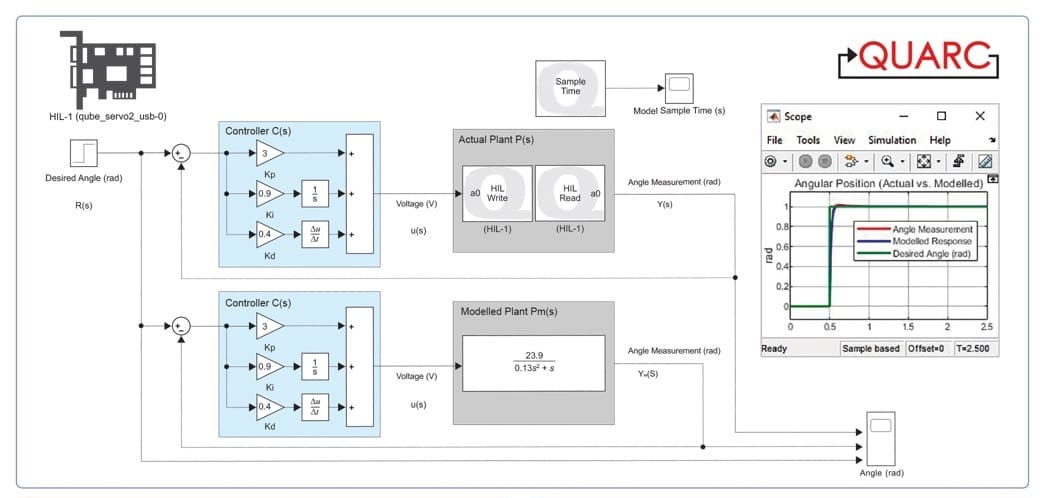
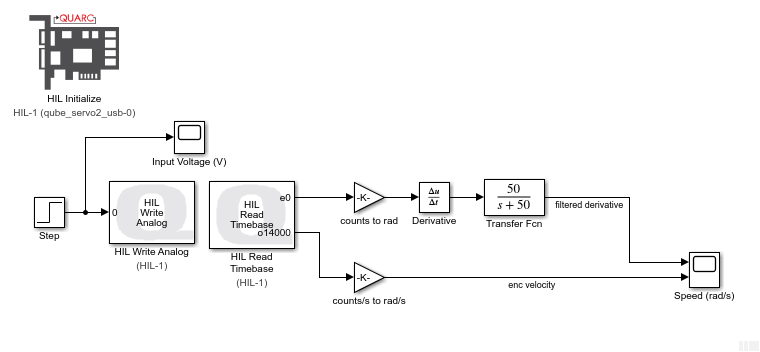
Here is an example running a step response on the QUBE-Servo 2 and comparing the response between the filtered derivative and the encoder velocity. As shown, although the filtered derivative response is smoother (i.e., less noise), the low-pass filter does add a bit of delay. Hardware-based encoder velocity is more accurate especially at lower velocities.
Join the QUARC Block Party!
In the upcoming weeks, we will be talking more about different blocks in QUARC and how they can help you. Follow Quanser on LinkedIn, Facebook, and Twitter to find out which blocks Quanser engineers like and why. You can join our QUARC Block Party too – email me (or comment below) and let me know which QUARC block is your favourite one and why!
I am looking forward to hearing from you!