QLabs Virtual Rotary Flexible Link

Virtual platform for distance and blended undergraduate control systems courses
QLabs Virtual Rotary Flexible Link is a fully instrumented, dynamically accurate digital twin of the Quanser Rotary Flexible Link system. It behaves in the same way as the physical hardware and can be measured and controlled using MATLAB®/Simulink® and other development environments. With QLabs Virtual Rotary Flexible Link, you can enrich your lectures and activities in traditional labs, or bring credible, authentic model-based lab experiences into your distance and online control systems course.
QLabs Virtual Rotary Flexible Link is available as a 12-month, multi-seat subscription. The platform is compatible with the physical Rotary Flexible Link curriculum, which covers various modelling and control topics.
Product Details
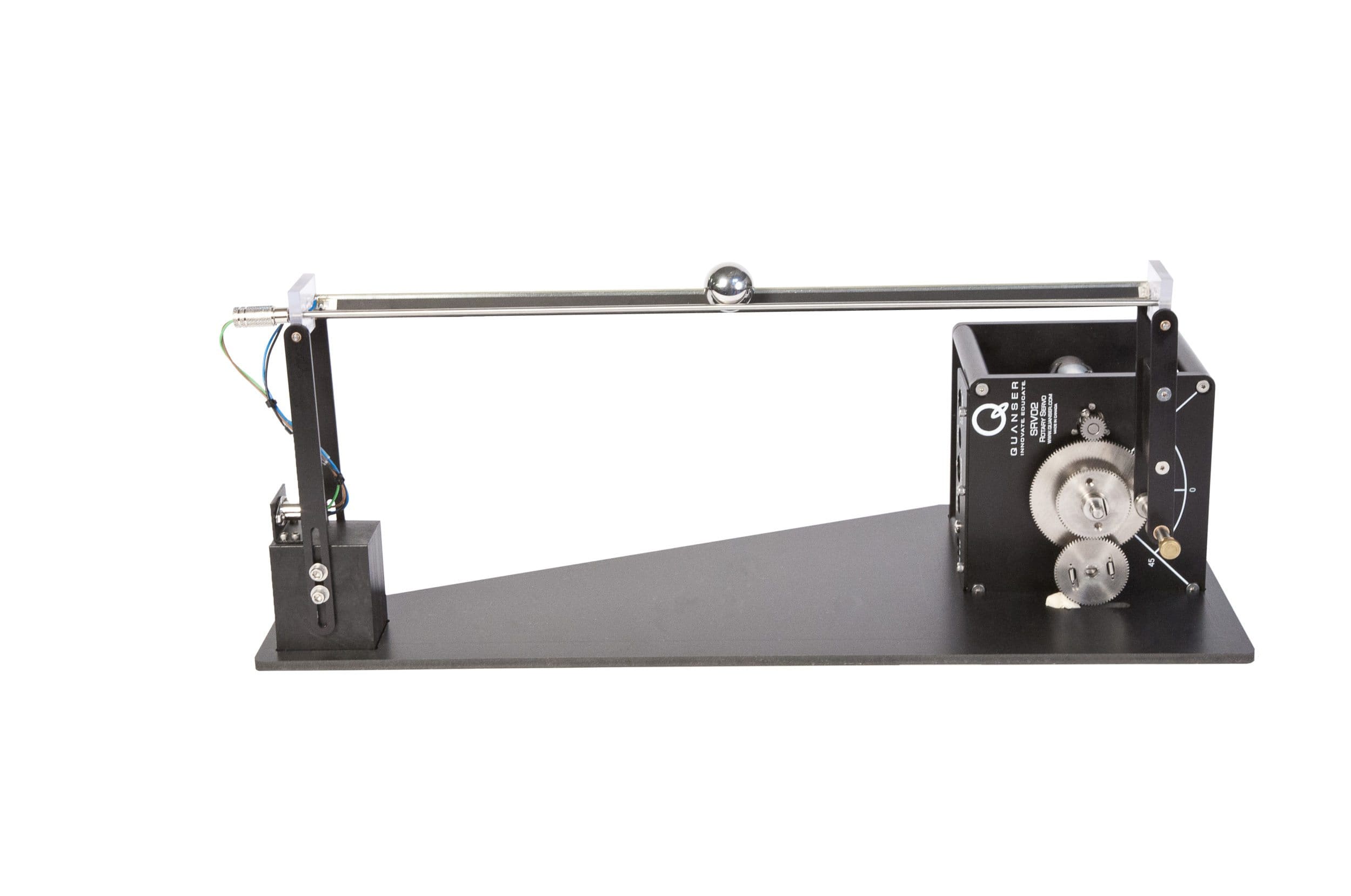
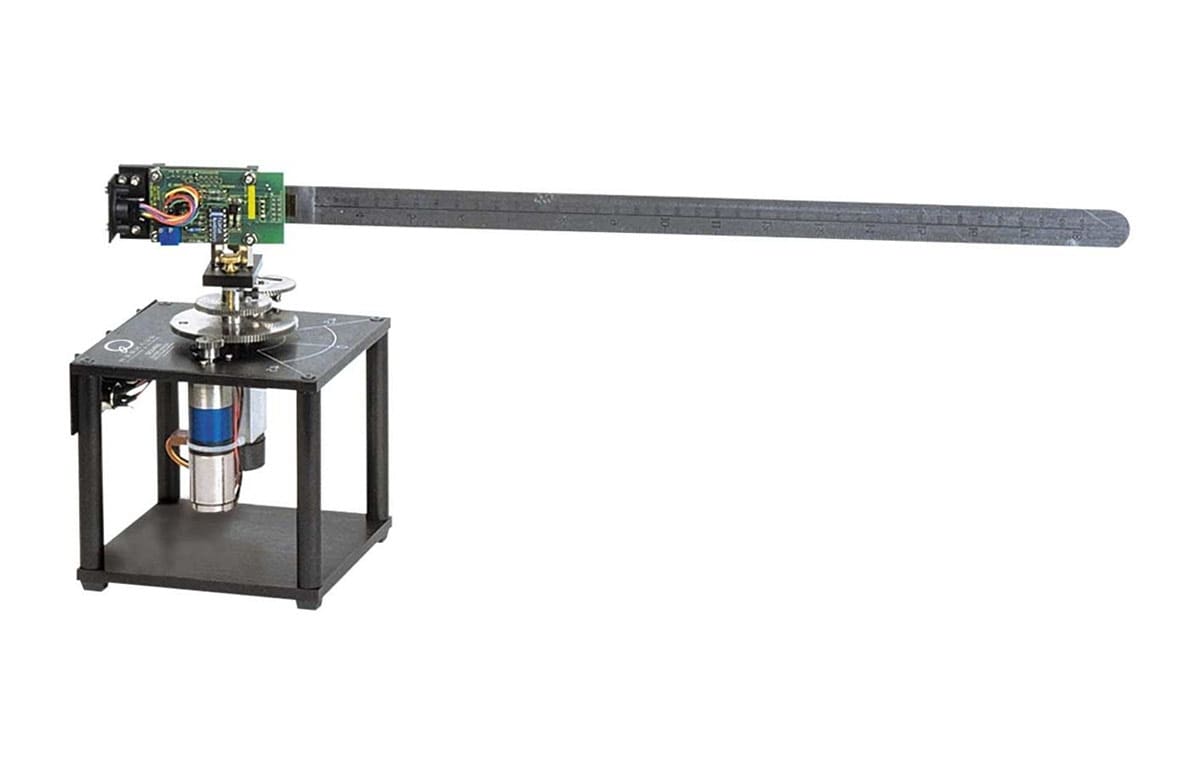
Same as the physical Rotary Flexible Link, the virtual system features a stainless-steel flexible beam with a strain gage mounted on the motor end of the link that can detect the deflection of the tip of the beam. In this experiment, students learn how to find the stiffness experimentally, and use Lagrange to develop the system model. This is then used to develop a feedback control using a linear-quadratic regulator, where the tip of a beam tracks a desired command while minimizing link deflection. This virtual experiment is ideal for the analysis and control of vibrations encountered in large, lightweight robotic structures that exhibit flexibilities and require feedback control for improved performance.
- High-fidelity, credible lab experiences equivalent to use of physical lab equipment
- 12-month, multi-seat subscription
- Full access to system parameters through MATLAB®/Simulink®
- ABET-aligned curriculum
Modeling Topics
- Lagrange derivation
- State-space representation
- Model validation
- Parameter estimation
Control Topics
- Linear-quadratic regulator
- Vibration control
Group Citation: Software
Explore more: All Research Paper
Related Products
Rotary Flexible Link
Control and vibration analysis of flexible links

Rotary Flexible Joint
Modeling flexible joints in robotic arms

QLabs Controls
Credible lab activities accessible off-campus

Rotary Servo Base Unit
Foundational modular control experiment

Rotary Double Inverted Pendulum
Take the classic inverted pendulum challenge to the next level

Rotary Inverted Pendulum
A classic modeling and control systems experiment

Qube-Servo 2
THIS PRODUCT IS NO LONGER AVAILABLE.