QNET 2.0 Rotary Pendulum Board
This product is no longer available.
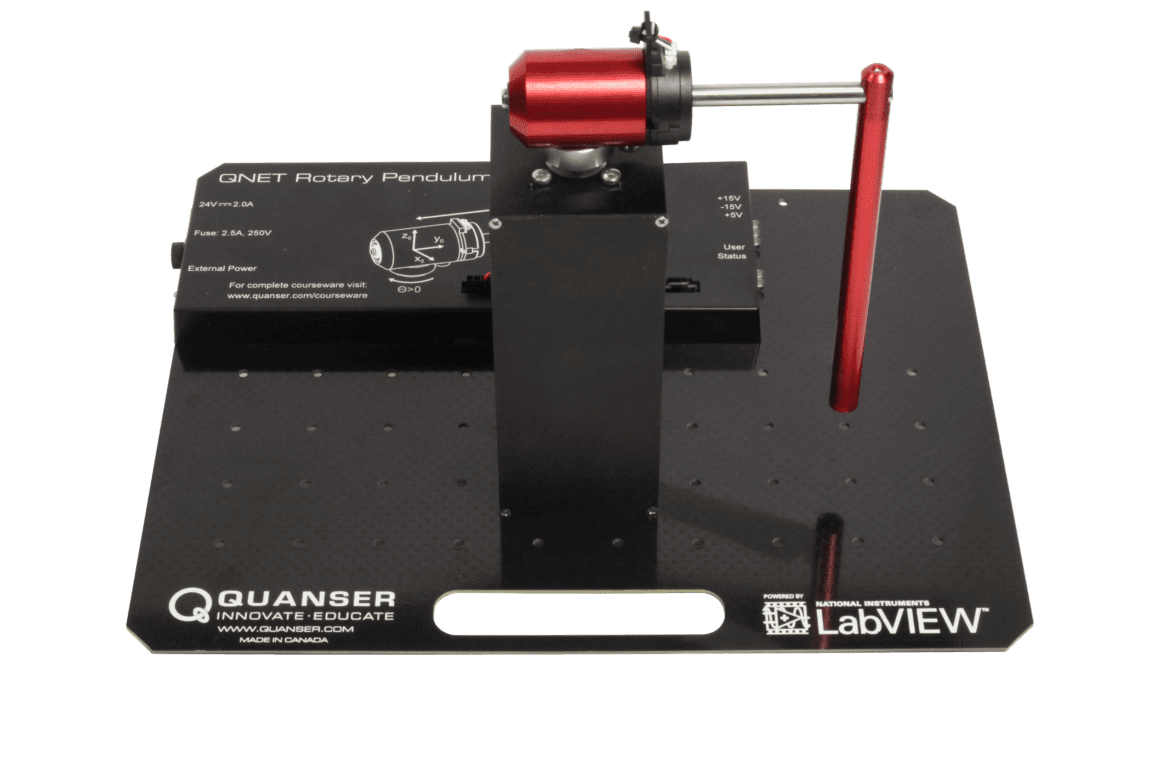
The Quanser QNET 2.0 Rotary Pendulum board is a versatile servo system designed to teach and demonstrate the fundamentals of inverted pendulum balance and control. Designed exclusively
for NI ELVIS platform and LabVIEW™ software, the system can easily be configured to demonstrate various control techniques, including LQR and hybrid swing up.
Gallery


Product Details
The QNET 2.0 Rotary Pendulum board consists of a direct-drive DC motor mounted vertically in a
solid aluminum frame and a pendulum suspended on a horizontal axis at the end of an L-shaped arm. The arm is connected to the motor shaft and pivots between ±180 degrees. The control variable is the input voltage to the pulse-width modulated (PWM) amplifier that drives the motor. The output variables are the angle of the pendulum and the angular position of the DC motor, measured by single-ended rotary encoders.
- Durable DC servo motor
- Built-in PWM amplifier with linear response
- High resolution optical encoders to sense to sense motor and pendulum positions
| Rotary pendulum link mass | 24 g |
| Rotary pendulum link length | 12.9 cm |
| Motor nominal input voltage | 18 V |
| Motor nominal speed | 3050 rpm |
| Motor torque constant | 0.042 Nm/A |
| Motor terminal resistance | 8.4 Ω |
| Rotor inertia of the motor | 4.0 x 10-6 kg.m² |
| Encoder line count | 512 lines/rev |
| Encoder line count in quadrature | 2048 lines/rev |
| Encoder resolution (in quadrature) | 0.176 deg/count |
| Amplifier type | PWM |
| Amplifier peak current | 2.5 A |
| Amplifier continuous current | 0.5 A |
| Amplifier output voltage | ± 24 V with 42% duty cycle limit (± 10 V) |
- System modeling
- Parameter estimation
- State-feedback balance control
- LQR optimization
- Non-minimum phase
- Friction compensation
- Non-linear swing up control
- Energy-based control
- Hybrid control
The following additional components are required to complete your workstation, and are sold separately:
For LabVIEW
- NI ELVIS II+
Related Products

QUBE – Servo 2
Versatile teaching platform for controls and mechatronics

Rotary Servo Base Unit
Foundational modular control experiment

Analog Electronics Labs (for NI ELVIS II+)
Bring Excitement and Relevance to Analog Circuit Design
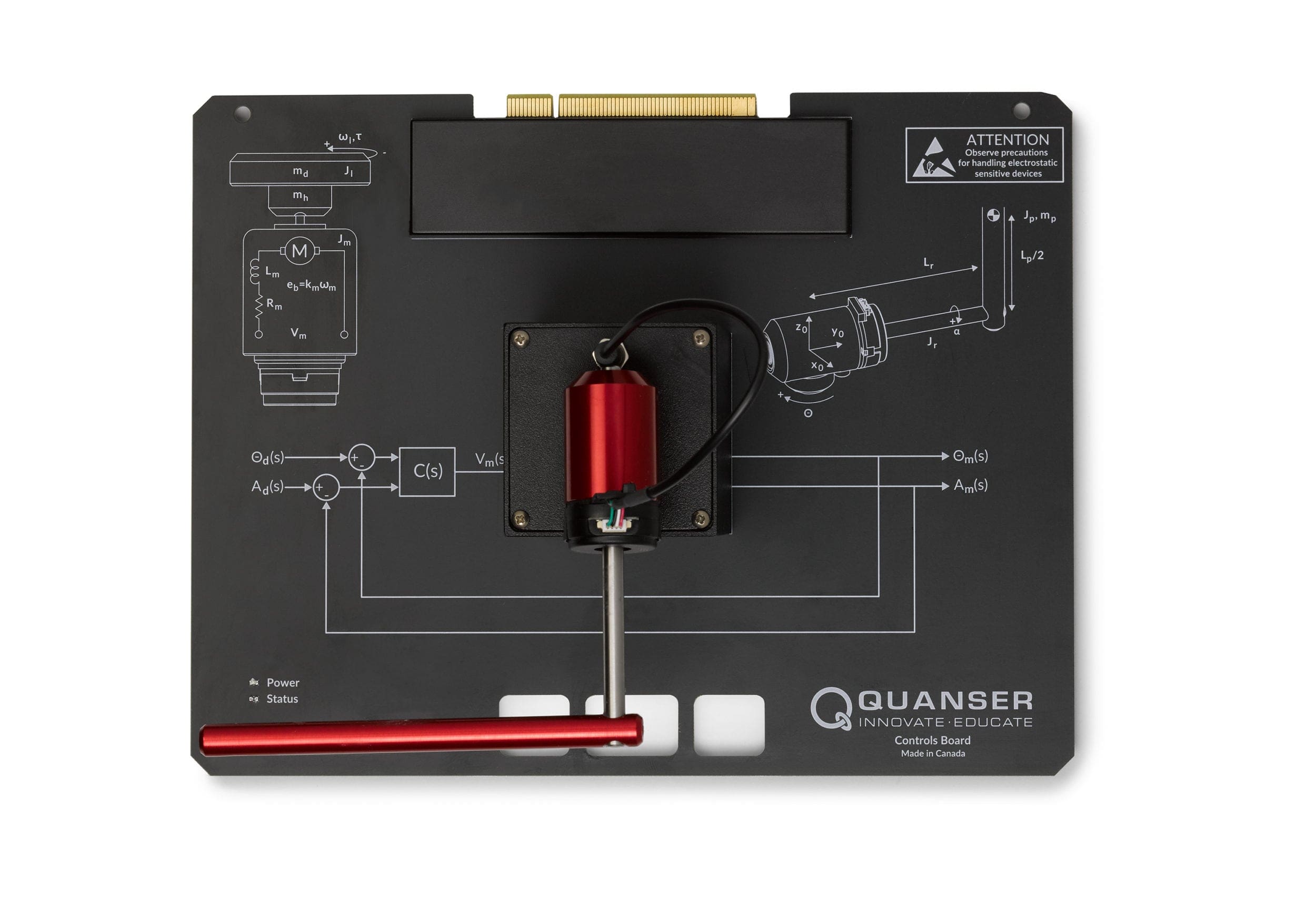
Quanser Controls Board
Investigate introductory and advanced controls
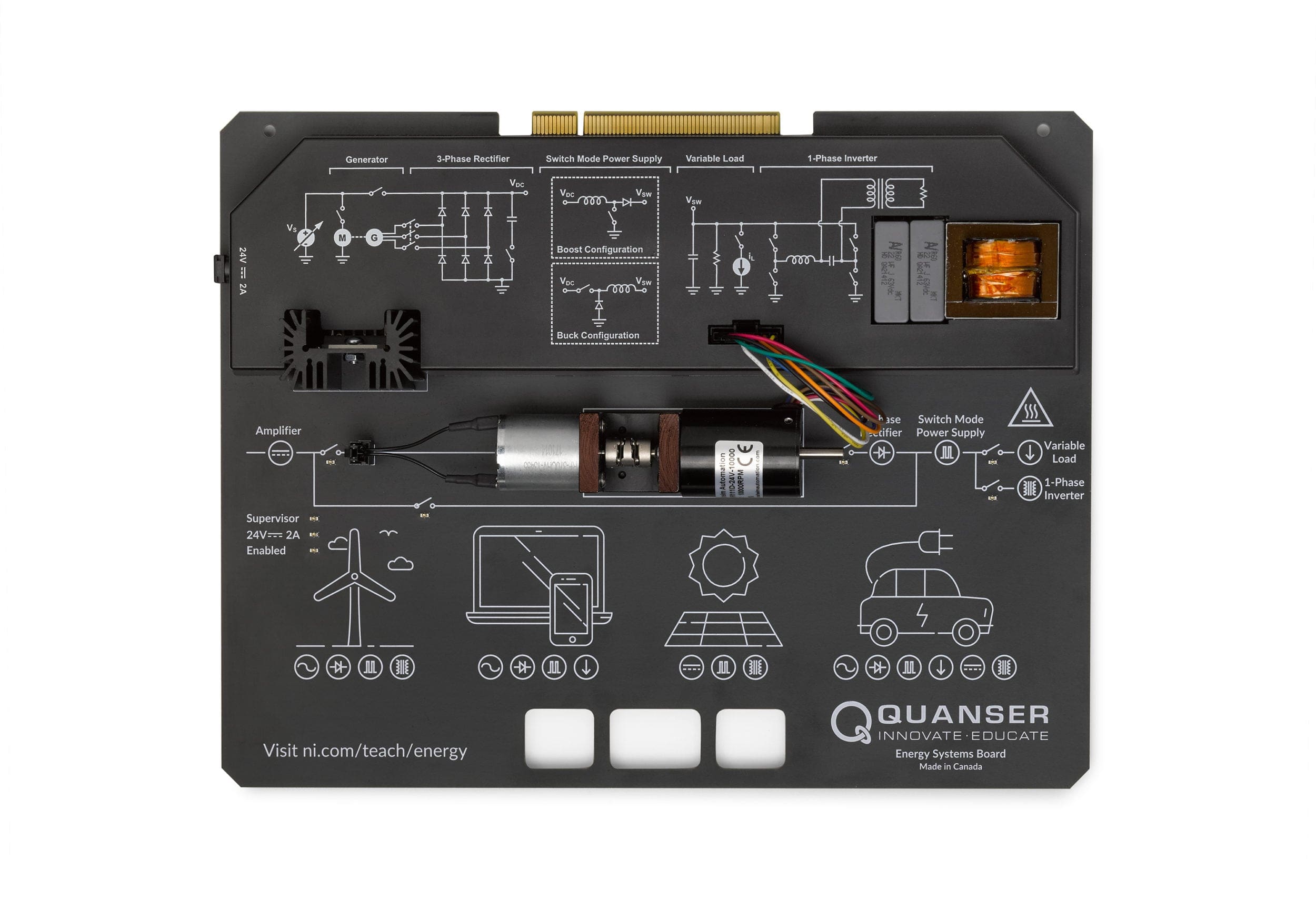
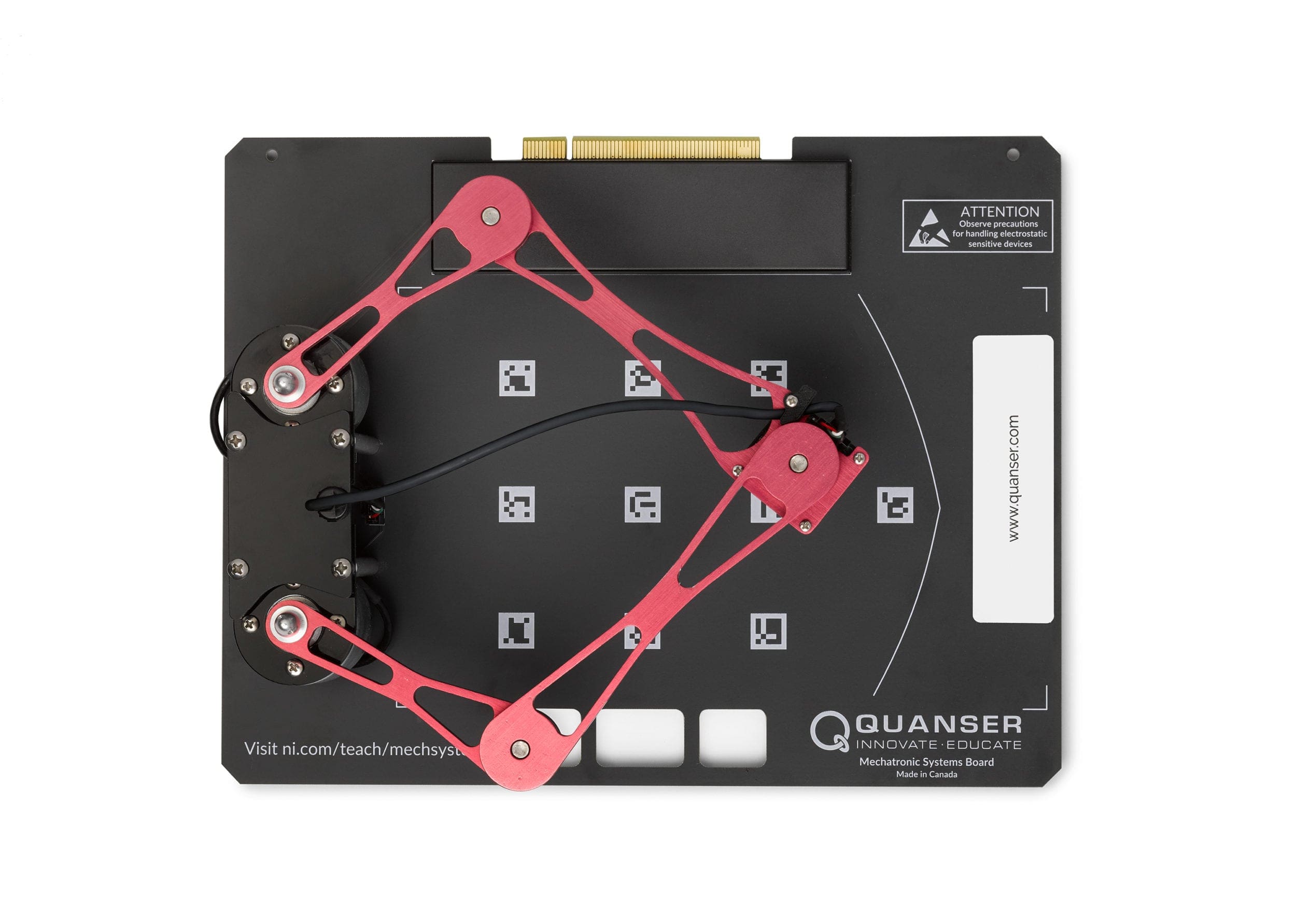
Quanser Energy Systems Board
Prepare students for energy systems engineering applications
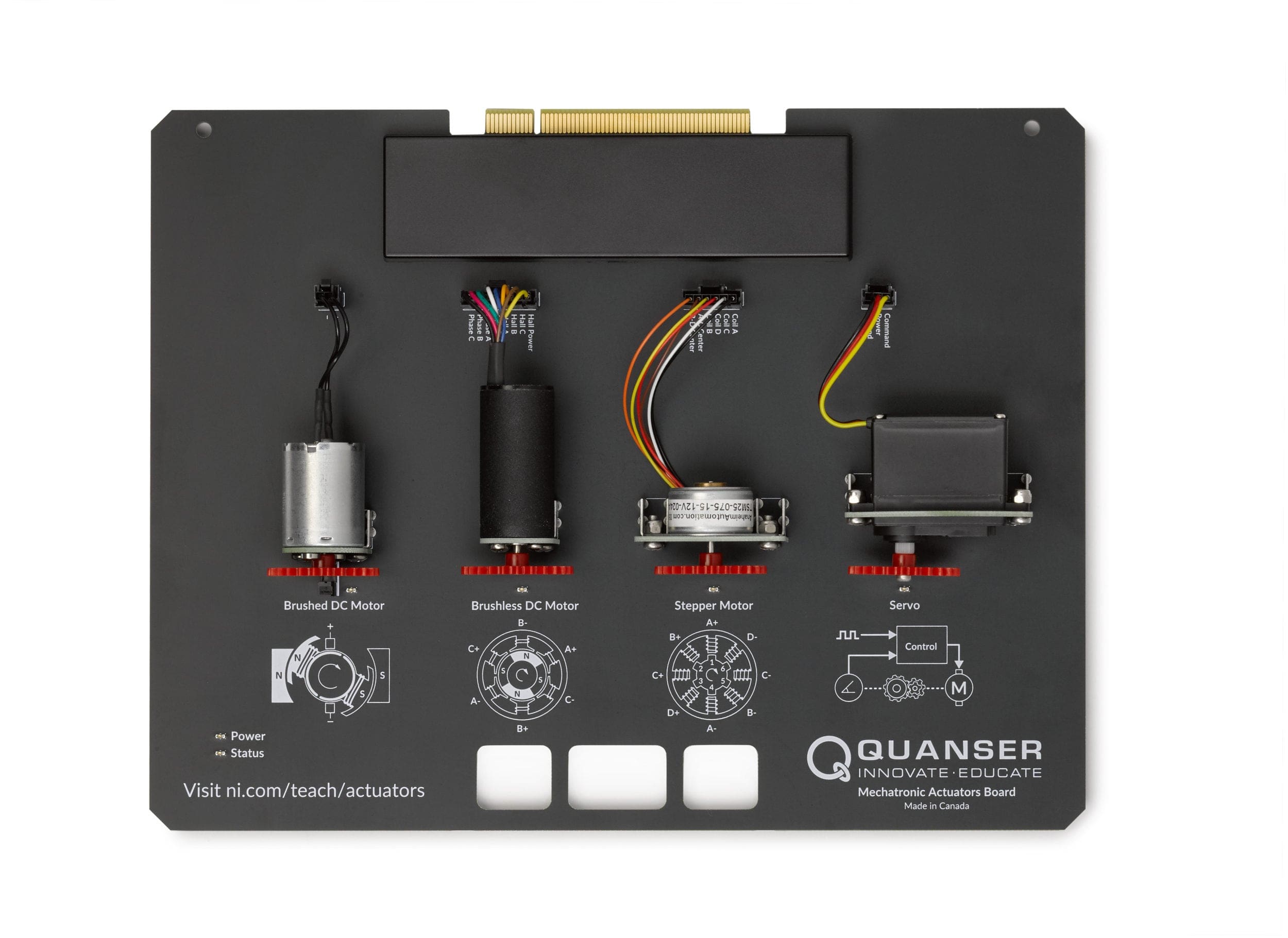
Quanser Mechatronic Actuators Board
Introducing students to actuators and their applications

Quanser Mechatronic Sensors Board
Introduce students to sensors and their applications