Physical AI is starting to move into real systems, but the way most labs are set up hasn’t caught up yet, and that gap is going to matter.
If you want to understand where this shift becomes real, one of the best places to look is manipulation. It’s because it forces a transition from what AI can represent to what a system can actually execute in the real world.
Why manipulation is different this time
Manipulation has always been part of robotics. What’s changing now is how it’s being approached.
It’s no longer just about controlling motion or executing predefined trajectories. The focus is shifting toward how systems acquire behavior, not just how they execute it.
A robot is no longer being programmed step by step. Instead, it is shown a task, collecting data from that interaction, learning a policy, and executing that behavior on a physical system. That changes the problem completely. It turns manipulation into a learning problem that has to hold up outside of simulation.
From task execution to behavior learning
Take a simple task like picking up an object and placing it somewhere else. Traditionally, this would be handled through modeling and control, with the behavior defined ahead of time.
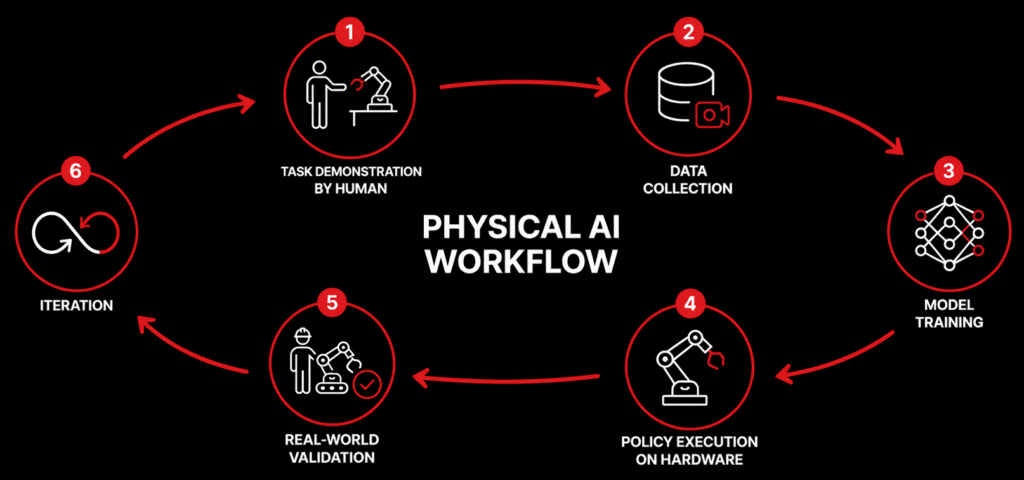
Now, the same task can be approached differently. A human demonstrates the task, the system records the data, training algorithms generate a policy, and that policy is executed on hardware. The focus shifts from defining motion to learning behavior from interaction.
That creates a different kind of research loop. Instead of working on isolated components, the work now connects demonstration, data collection, training, and execution into a continuous process. And importantly, that process can run directly on physical systems, not just in simulation.
Where things actually break
This is where the limitations become clear.
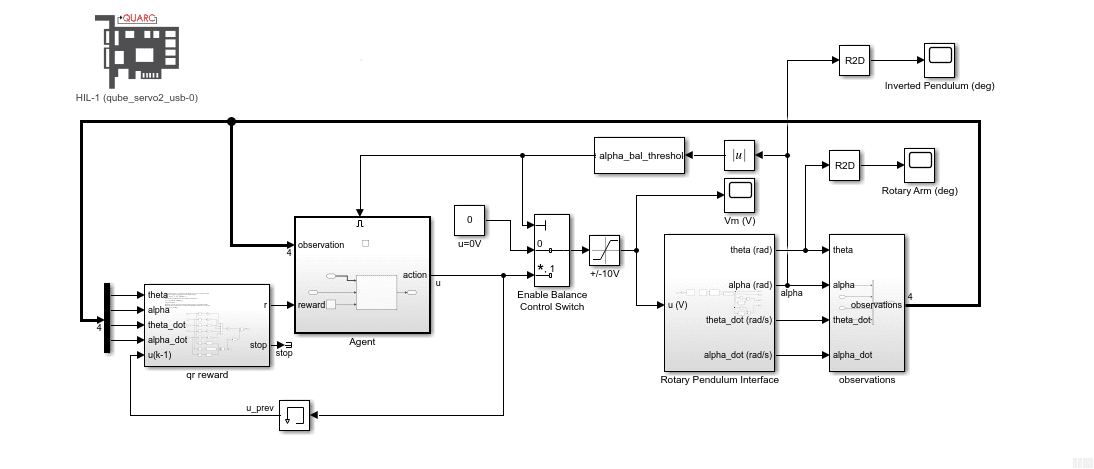
A model that performs well in simulation doesn’t always behave the same way on a real system. Not because the model is incorrect, but because the system introduces variables that are difficult to capture fully.
Sensor timing varies, communication delays appear, actuators respond differently, and once physical contact is involved, small differences start to matter. I usually describe it simply: it’s not just the physics, it’s the plumbing.
Manipulation is one of the places where this gap becomes immediately visible. A behavior that looks stable in simulation can become inconsistent when deployed, and that gap is where most of the work actually is.
Why validation is becoming the real research problem
Because of this, the focus in research is shifting.
It’s no longer enough to show that a model works in principle. The expectation is that the behavior can run on real hardware, perform consistently, handle variation, and be reproduced by others.
That puts validation at the center of the problem.
And in manipulation, validation is not abstract. You’re not evaluating a prediction, you’re evaluating whether a system can perform a task reliably over time, under real conditions. That’s a different level of requirement, and it changes how research needs to be structured.
What this means for research platforms
As this shift happens, the limitations of traditional systems become more obvious.
At Quanser, we’ve seen this progression directly. Platforms like QArm and QArm Mini have been widely used in teaching environments around the world, where the focus is on building intuition around control, robotics, and system behavior. They are effective because they make these concepts accessible and tangible.

But research introduces a different set of requirements.
The problem is no longer just understanding how a system works. It’s about developing, testing, and validating new behaviors. That requires a platform that supports the full workflow, allowing a researcher to demonstrate a task, collect data, train a model, and execute that behavior on hardware in a repeatable way.
That’s not just an incremental step. It’s a different category of system, one that is designed around Physical AI workflows rather than predefined experiments.
Looking ahead
If you step back, the direction is clear.
Physical AI is moving out of the conceptual phase and into a more practical, system-level phase. The focus is shifting from what models can represent to what systems can reliably do.
Manipulation is one of the clearest places where that shift is happening. It forces you to deal with learning, control, and real-world interaction at the same time, and it makes the gap between simulation and reality impossible to ignore.
At Quanser, this is something we’ve been working toward for a long time. Our teaching platforms have helped build the foundation, but the next step is supporting research at this level.
In the next few months, we’ll be introducing a new research manipulator platform designed specifically for this kind of work. It’s built to support the full Physical AI pipeline, from demonstration and data collection through to policy execution and validation on real hardware.