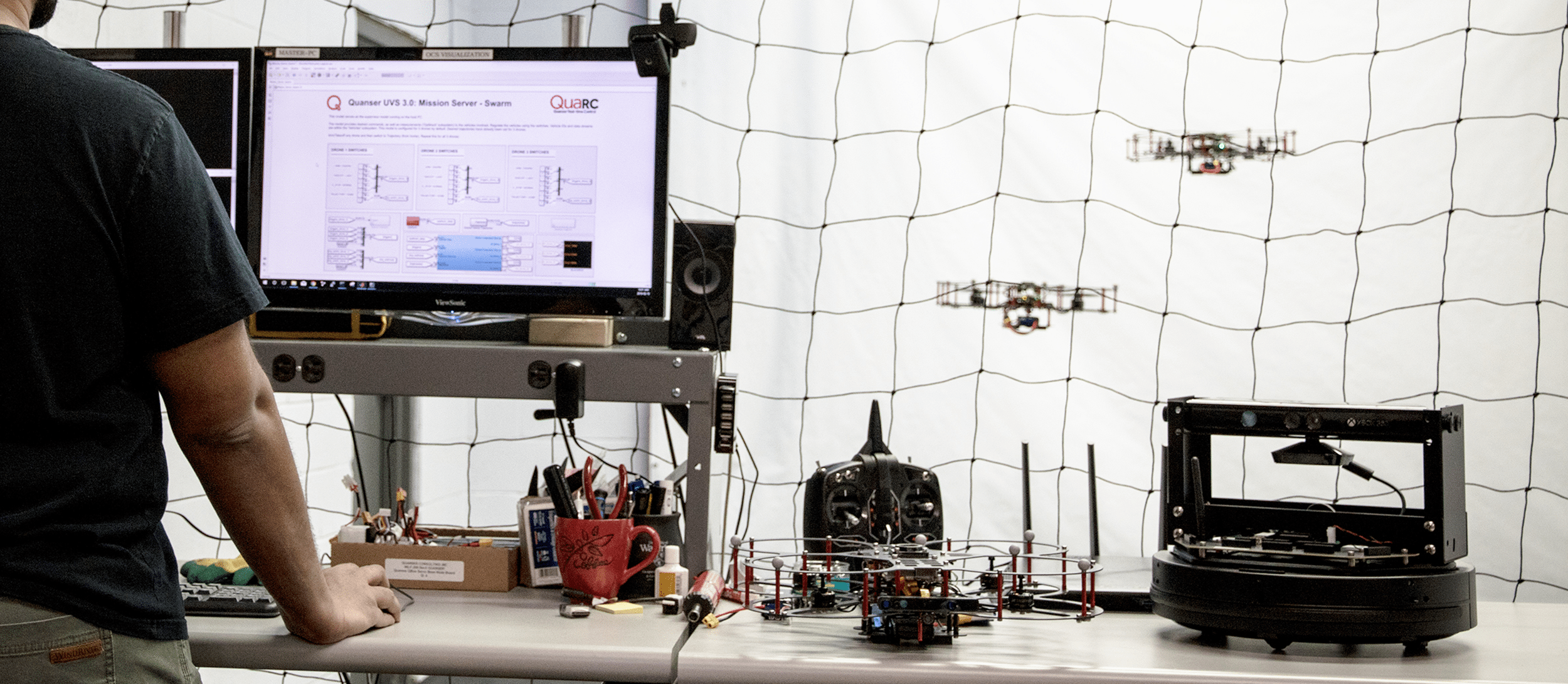

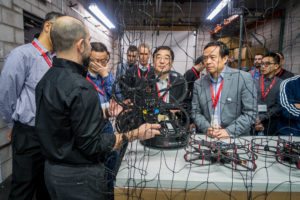
 A couple of weeks ago, we invited a group of researchers from all across Canada to Quanser’s Markham headquarters for a roundtable discussion on autonomous vehicles. While we gave them a sneak peek of our new (and by now already released) Autonomous Vehicles Research Studio, featuring the QDrone, they talked about their fascinating research projects. I was quite impressed with the work being done by Dr. Youmin Zhang’s groups in the Diagnosis, Flight Control & Simulation (DFCS) and Networked Autonomous Vehicles (NAV) Labs at Concordia University. So when Dr. Zhang invited us for a visit, I was extremely excited about the opportunity.
A couple of weeks ago, we invited a group of researchers from all across Canada to Quanser’s Markham headquarters for a roundtable discussion on autonomous vehicles. While we gave them a sneak peek of our new (and by now already released) Autonomous Vehicles Research Studio, featuring the QDrone, they talked about their fascinating research projects. I was quite impressed with the work being done by Dr. Youmin Zhang’s groups in the Diagnosis, Flight Control & Simulation (DFCS) and Networked Autonomous Vehicles (NAV) Labs at Concordia University. So when Dr. Zhang invited us for a visit, I was extremely excited about the opportunity.

Dr. Zhang was one of the early users of the QBall-X4, the first generation of our research drones, as well as QGVs, the ground robots. He brought them to his research lab to work on fault-tolerant control, collaborative control, and – well, you can check all the topics on Dr. Zhang’s Google Scholar profile, there are just too many to list. Dr. Zhang also started using the QBalls in his Flight Control Systems undergraduate courses as early as in 2010.
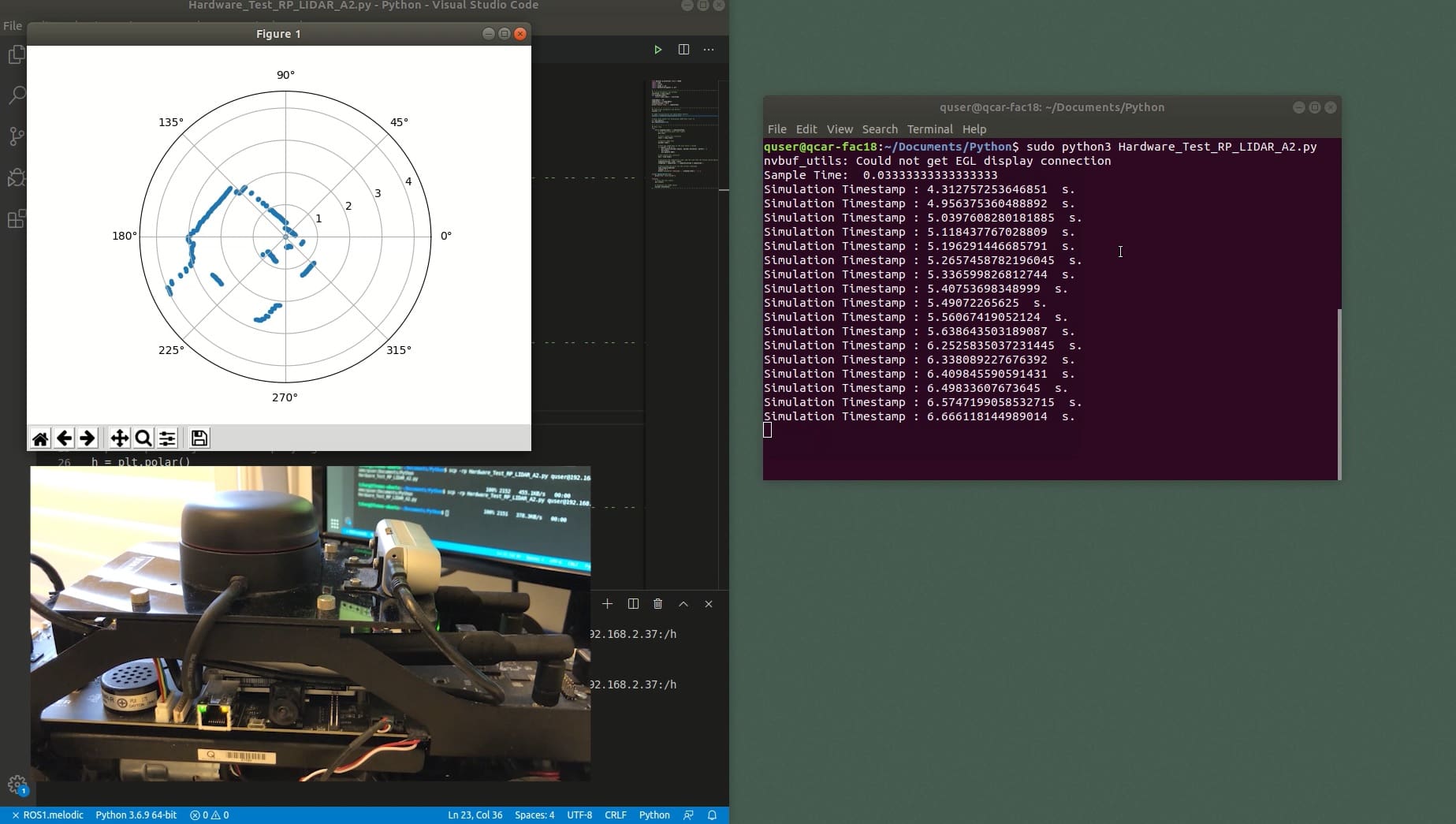
Back at our roundtable discussion, Dr. Zhang was quite happy with the new QDrone quadcopter. With the onboard Intel Aero compute board, three cameras, smaller size than the QBall, and expandable I/O (e.g., UART, SPI, I2C, ADC, encoder input, and PWM output), he immediately saw how they could put them to good use in his labs. By adding sensors to the vehicle through the expandable I/O connectors, his research group can potentially use them for forest fire monitoring and detection applications they are working on.
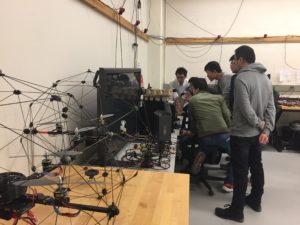
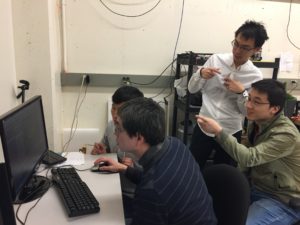
And while our roundtable discussion was still fresh in our minds, I made the trip to Dr. Zhang’s lab last week to meet with him and his students and to help them test the new drones.
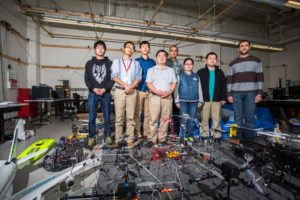
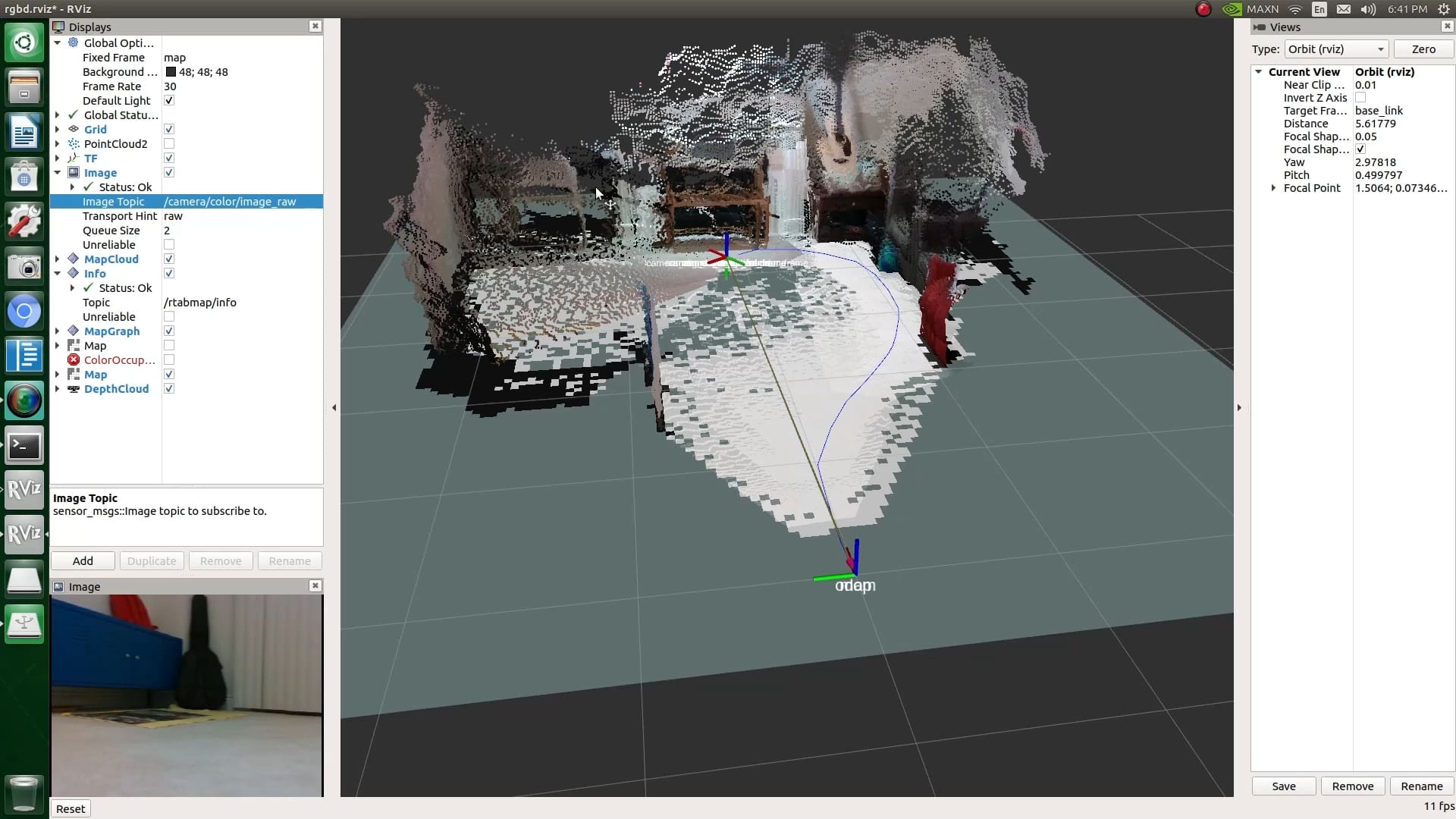
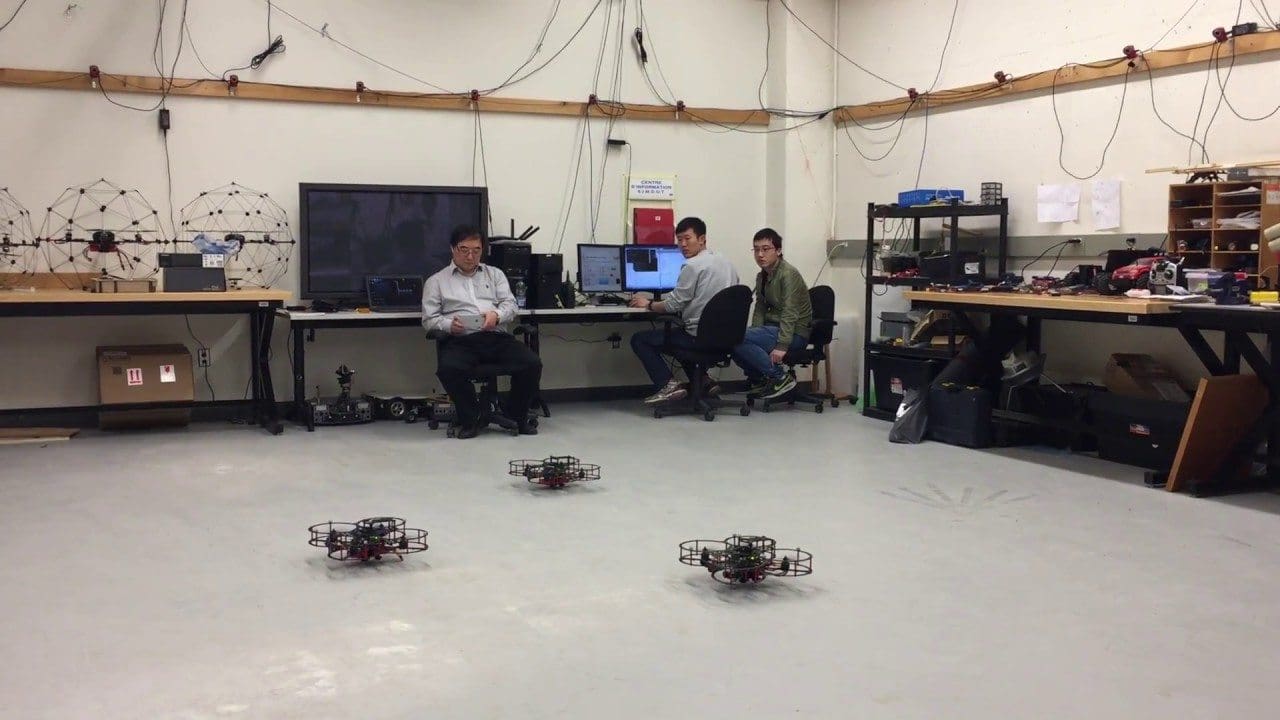
Dr. Zhang’s lab at Concordia is packed with all kinds of autonomous vehicles, but they were very eager to start playing with these new “toys,” so we got to work right away. With a quick overview of the QDrone’s functionalities and a refresher training on QUARC, our real-time rapid control prototyping software, we were flying the new QDrones in less than 3 hours. Along the way, we discussed potential improvements and optimization that can be implemented in their lab to help streamline the process of running experiments. I look forward to seeing how the Qdrones and the whole Autonomous Vehicles Research Studio setup will help them expand and accelerate their research!