
Haptic Robot
High-definition, open-architecture haptic platform for advanced robotics, teleoperation, Physical AI research.
The Haptic Robot is a high-precision, 6 degrees of freedom haptic interface designed for advanced research in robotics, teleoperation, human-machine interaction, and dexterous manipulation. It provides programmable force feedback in 5 DOF, X, Y, Z, Roll, and Pitch, with continuous yaw motion, enabling responsive control for teleoperated robotic systems, augmented haptic feedback, and human-in-the-loop Physical AI workflows. The device connects supports a simple plug & play USB interface for quick integration with other Quanser robotic systems.
Gallery


Product Details
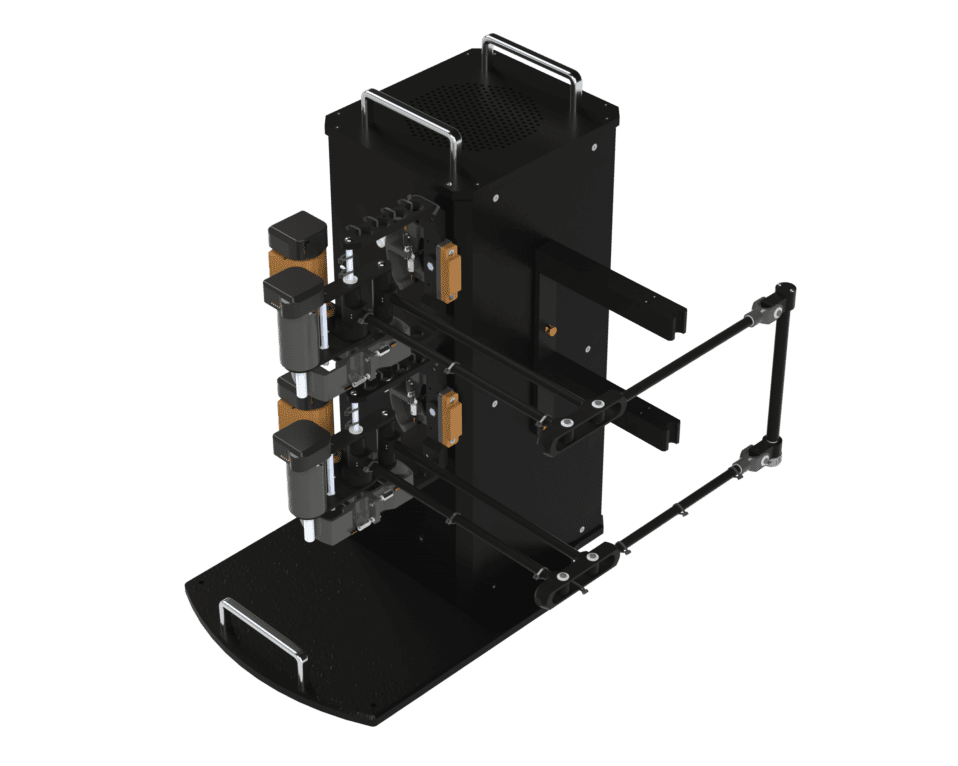
The Haptic Robot features a large workspace, very low intervening dynamics, and a highly back-drivable parallel mechanism with negligible friction. Its heavy-duty capstan drive, high-performance DC motors, high-resolution optical encoders, adjustable brass counterbalances, and six built-in high-bandwidth linear current amplifiers enable stiffness coefficients up to 3,000 N/m. Researchers can deploy and validate custom control strategies, teleoperation methods, adaptive feedback systems, and human demonstration workflows seamlessly from MATLAB® and Simulink®, Python® & ROS 2™.
The Haptic Robot can be used as a standalone haptic research platform or as part of the Quanser Physical AI Lab, where it pairs with the QArm Research manipulator to support teleoperation, data generation, imitation learning, and end-to-end physical AI research.
High Performance
6-DOF parallel mechanism with capstan drive delivers high torque, low backlash, and fast response
Precise and Robust
High-stiffness, low-friction structure with sub-millimeter encoder precision ensures accurate motion tracking.
Open Architecture
Full access to current, velocity, and position loops with flexible I/O integration
Haptic Leader
Integrate with a variety of robotic systems to support teleoperation, imitation learning, and end-to-end physical AI research
| X | Y | Z | Roll | Pitch | Yaw | |
|---|---|---|---|---|---|---|
| Workspace | 800 mm | 250 mm | 350 mm | 180° | 180° | continuous |
| Tip Inertia | 300 g | 300 g | 300 g | 2.29 g/m² | 2.29 g/m² | 0.79 g/m² |
| Back Drive Friction | 0.353 N | 0.353 N | 0.353 N | 61.775 N/mm | 61.775 N/mm | 0.5 N/mm |
| Maximum Force/Torque at 2A | 19.71 N | 19.71 N | 13.94 N | 1.72 Nm | 1.72 Nm | 1.72 Nm |
| Maximum Force/Torque at 1.1A | 10.84 N | 10.84 N | 7.67 N | 0.948 Nm | 0.948 Nm | 0.948 Nm |
| Position Resolution | 0.051 mm | 0.051 mm | 0.051 mm | 0.033° | 0.033° | 0.088° |
| Stiffness at 10KHz | 3000 N/m | 3000 N/m | 3000 N/m | 3.4 Nm/rad | 3.4 Nm/rad | 0.05 Nm/rad |
| Dimensions (H x W x L) | 0.53m×0.3m×0.5m | |||||
| Mass (w/ amplifiers) | 22 kg | |||||
| Actuators | 6 DC motors w/ capstan-drive transmission for high torque & low inertia | |||||
| Sensors | 7 optical encoders for precise 6-DOF motion tracking | |||||
| Connectivity | USB interface for PC connection and a pedal connection | |||||
* Subject to change
Related Products

Physical AI Lab
Kickstart, integrate, accelerate & sustain research workflows in traditional robotics, applied AI & physical AI.

Intelligent Automation Lab
The most open and reconfigurable industrially inspired teaching lab available
