
Omni Bundle

Cost-effective way to introduce robotics and haptics
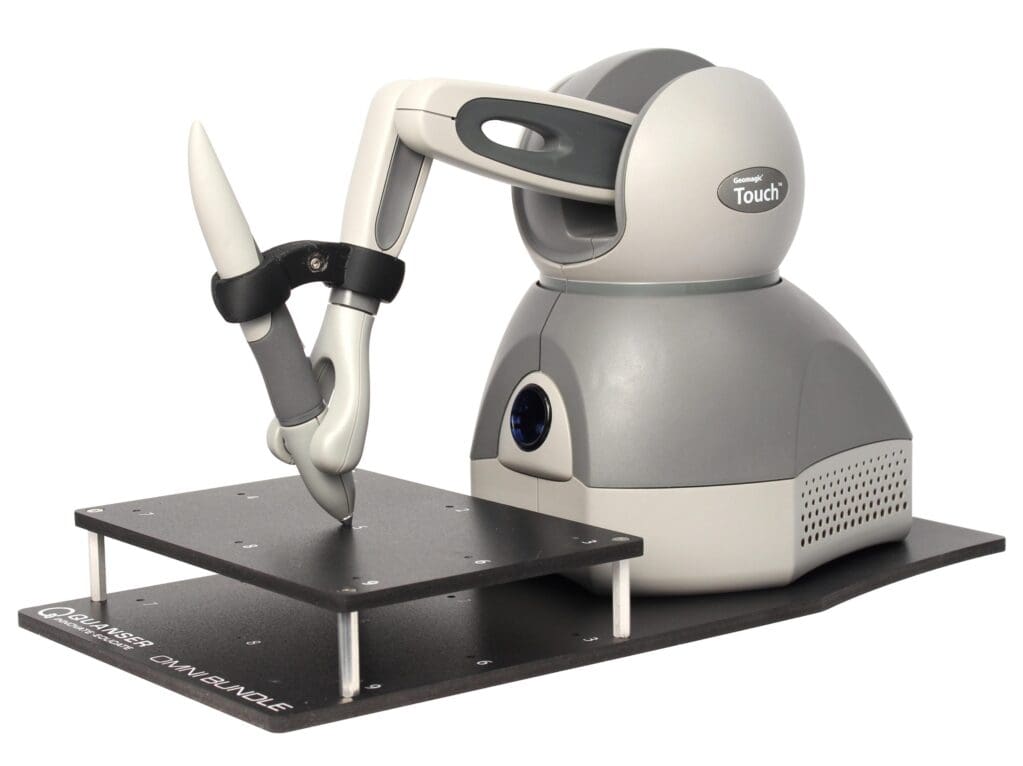
The Omni™Bundle is a cost-effective and safe way to introduce intermediate and advanced control concepts and theories related to robotics and haptics. Combining Geomagic Touch™ (formerly SensAble Phantom Omni) haptic device with QUARC® control software and comprehensive Quanser-developed curriculum allows students to easily translate course theory into hands-on experience.
Product Details
The Geomagic Touch haptic device is a robot with six revolute joints, three of which are actuated. The three non-actuated joints are the wrist joints. The three motors can actuate the end-effector – the tip of the stylus – to span the entire X, Y, Z region in its workspace. Position measurement along X, Y, and Z is done using digital encoders while measurement of rotations about these axes (roll, pitch and yaw) is done using potentiometers.
- CE certified Geomagic Touch (formerly Phantom Omni) haptic device
- Six-degree-of-freedom positional sensing
- Portable design and compact footprint for workplace flexibility
- Removable stylus for end-user customization
- Two integrated momentary switches on the stylus for ease-of-use, and end-user customization
- Wrist rest to maximize user comfort
- Constructed of metal components and injection-molded plastics
- Stylus-docking inkwell for automatic workspace calibration
| Force Feedback Workspace (W x H x D) | 160 mm x 120 mm x 70 mm |
| Footprint (Physical Area Device Occupies on Desk) | 168 mm x 203 mm |
| Device Mass | 1.8 kg |
| Range of Motion | Hand movement pivoting at wrist |
| Nominal Position Resolution | > 450 dpi/0.055 mm |
| Maximum Exertable Force at Nominal Position | 3.3 N |
| Continuous Exertable Force (24 hrs) | 0.88 N |
| Stiffness | 1.26 N/mm (X axis)/ 2.31 N/mm (Y axis)/ 1.02 N/mm (Z axis) |
| Inertia (Apparent Mass at Tip) | 45 g |
| Force Feedback | x, y, z |
| Interface | USB |
- Forward kinematics and D-H parameters
- Inverse kinematics
- Joint level PD and PID control
- Trajectory planning (joint space vs. task space)
- Jacobian derivation and application
- Various “force law” haptic rendering (force fields, hard and soft contacts, etc.)
- Graphics development using Quanser 3D Viewer
No additional components are required to set up your Omni Bundle workstation.
Group Citation: Manipulator Robotics
Explore more: All Research Paper
Related Products

2 DOF Robot
Introduce fundamental principles of robotics

Joint Control Robot – 4 DOF
This product is no longer available.

Joint Control Robot – 6 DOF D
THIS PRODUCT IS NO LONGER AVAILABLE.
