QBall 2

This product is no longer available.
The Quanser QBall-X4 and its later version, QBall 2, were the first open-architecture quadrotors for indoor autonomous robotics research. To accelerate research in multi-agent, swarm, and vision-based applications, we now offer the QDrone, a feature vehicle of the Quanser Autonomous Vehicles Research Studio.
Gallery


Product Details
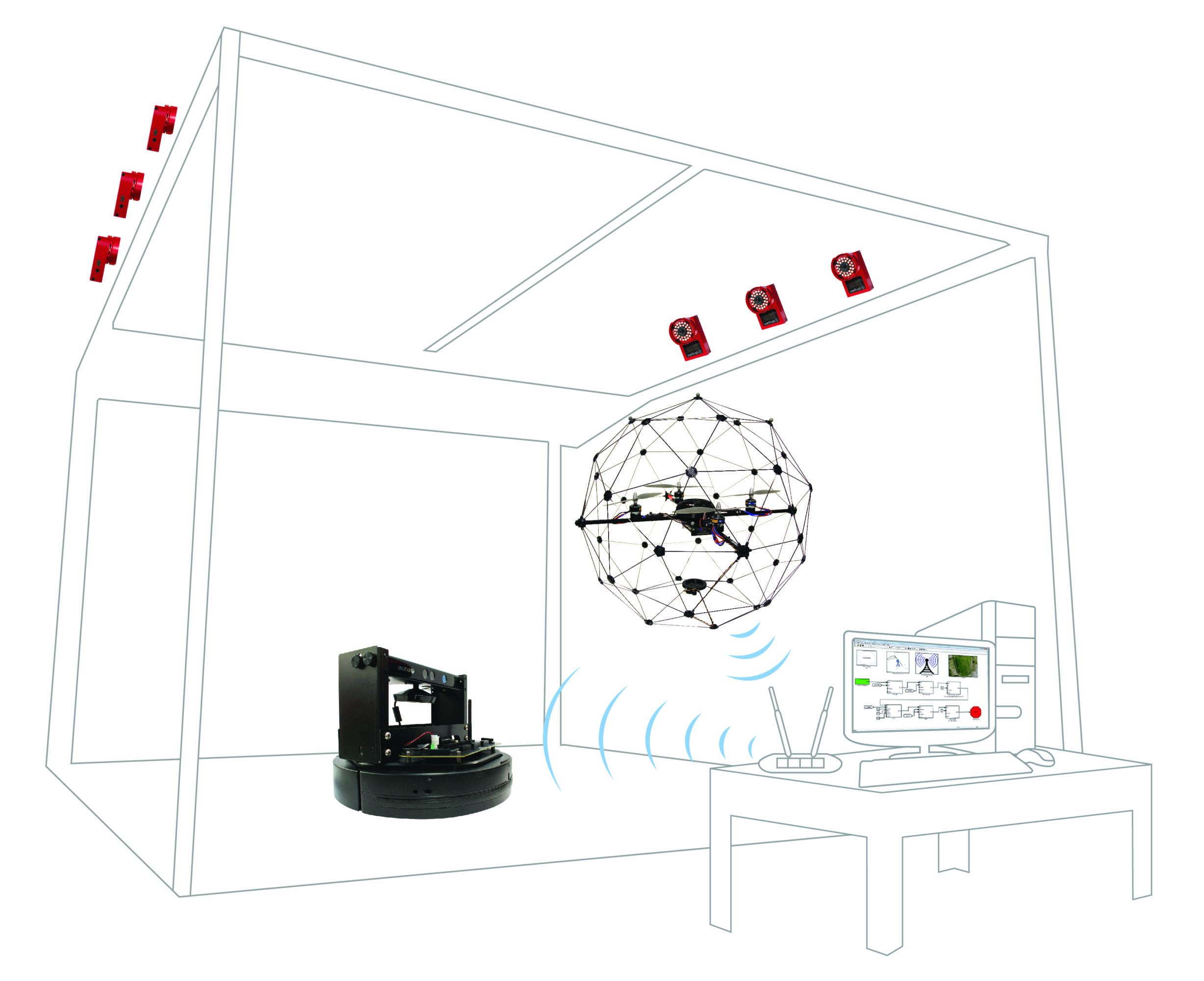
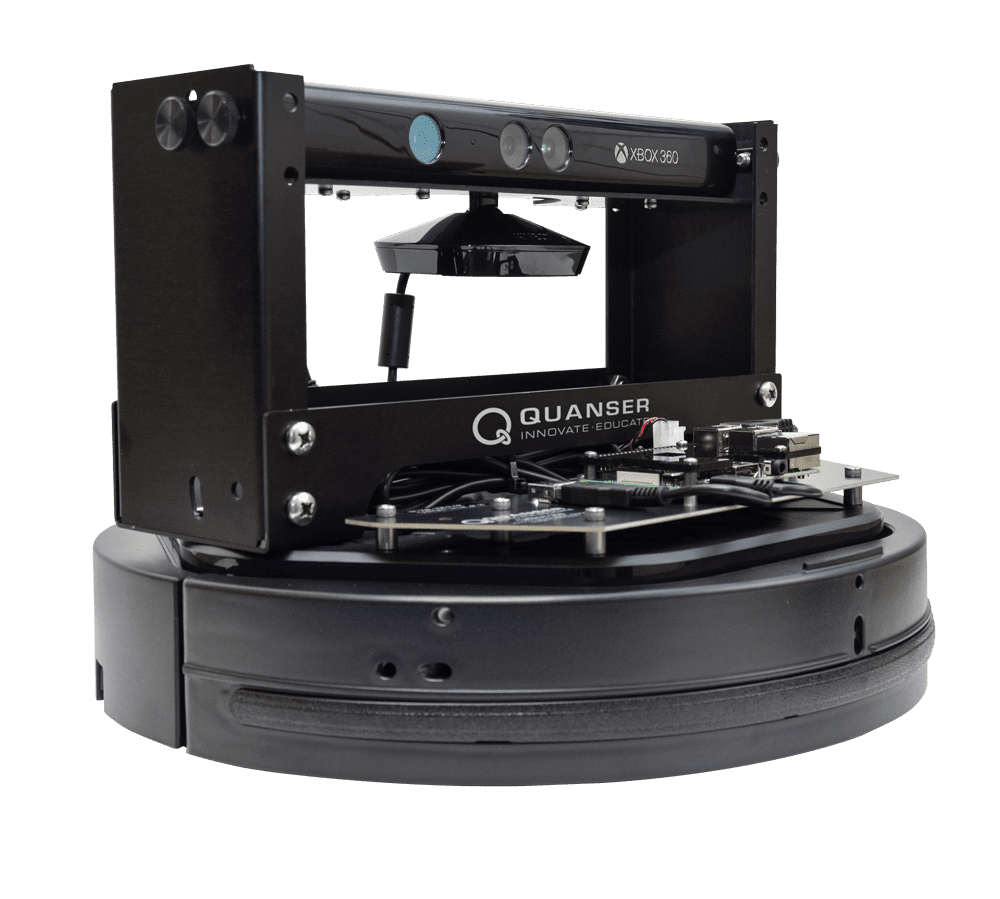
The Quanser QBall 2 quadrotor is an innovative indoor rotary wing platform suitable for a wide variety of unmanned vehicle research applications. A complete system includes the QBall 2, ground control station, and OptiTrack cameras. The open-architecture design allows users to add other off-the-shelf sensors. This presents a flexible, open-architecture platform researchers can use to quickly develop and apply controllers and control algorithms, without having to integrate disparate hardware and software resources.
- Protective carbon fiber cage for indoors use, enclosing Qball 2 motors, propellers and embedded computer
- Ready for use out of the box, no assembly required
- High-definition on-board avionics data acquisition card
- Low power on-board computer with Linux operating system for high-level, real-time decision making and task execution
- Built-in sensors (3-axis accelerometer, 3-axis gyroscope, sonar height sensor)
- Customizable with off-the-shelf sensors supported by QUARC (digital – SPI, UART, IªC; analog sensor)
- Accurate localization and tracking system
- Wireless inter-vehicle communication capabilities for multi-agent research applications
- Up to 10 min flight time on one battery charge
- Up to 300 g payload
| QBall 2 | |
| Diameter | 0.7 m |
| Power | 2 LiPo rechargeable batteries, 2700 mAh, 3-cell |
| Flight time | 10 min per charge |
| Weight (with batteries) | 1.8 kg |
| Maximum payload | 300 g |
| Embedded Computer | |
| On-board computer | Gumstix DuoVero Zephyr with integrated 802.11 b/g/n WiFi |
| Processor | ARM Cortex-A9, 1 GHz |
| Memory | 1 GB DDR SDRAM |
| QUARC maximum sample rate | 1,000 Hz |
| I/O Channels Specifications | |
| PWM motor outputs | 4 |
| Configurable PWM outputs | 2 |
| 3-axis gyroscope | 250 deg/s – 500 deg/s – 2,000 deg/s selectable range |
| 3-axis accelerometer | ± 2g – ± 4g – ± 8g selectable range |
| Sonar height sensor | 0.2 m – 7.65 m range 1 cm resolution |
| Analog input | 2 12-bit, 0 V – 5 V |
| SPI | 1 |
| Reconfigurable digital I/O | 8 |
| UART | 1 serial 3.3V |
| I²C | 1 |
For Simulink
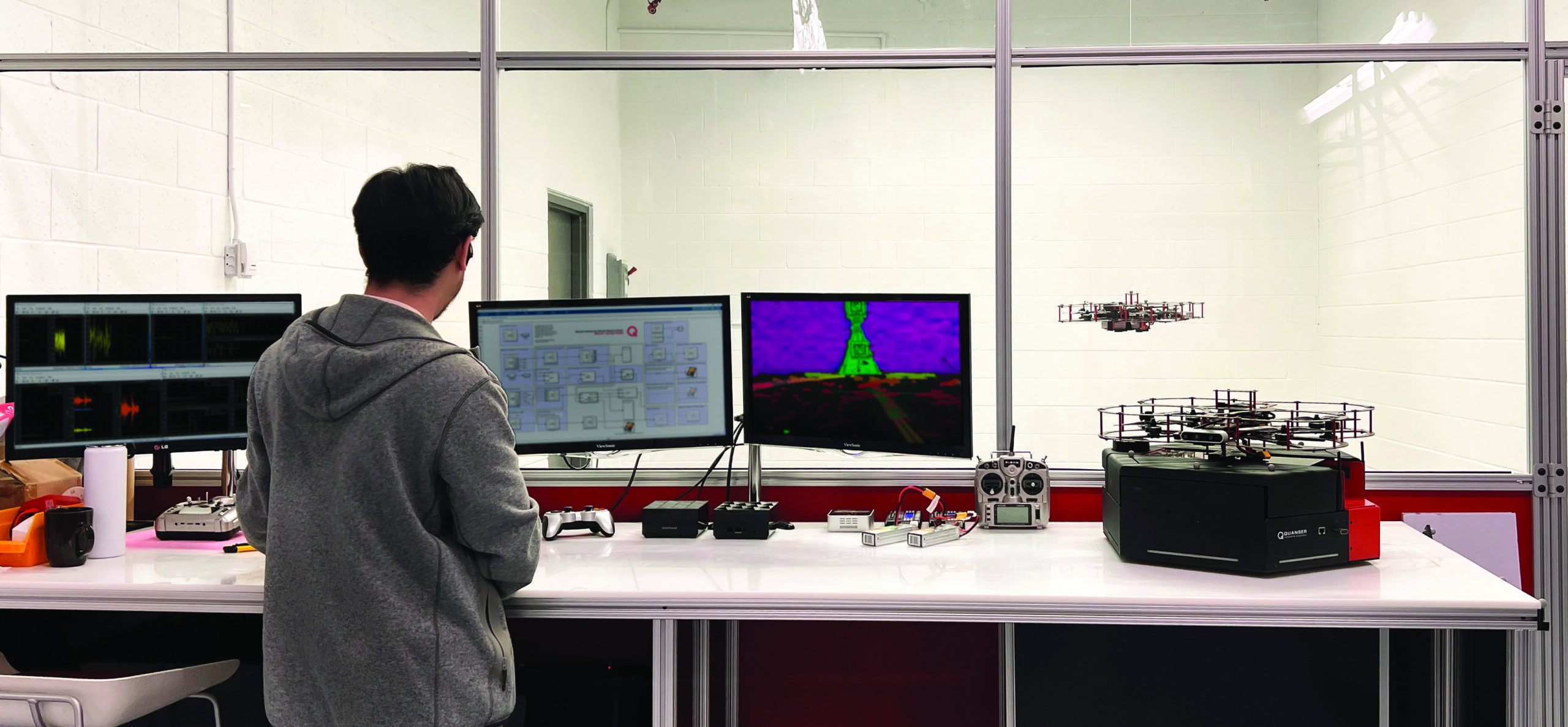
QBall 2 workstation includes
- Ground station with QUARC® add-on for MATLAB®/Simulink®
- QBall 2 with joystick
- 6-camera OptiTrack localization system* with the OptiTrack Motive software
- Extra 2-LiPo battery pack
Required software not included:
- Stateflow® Simulink add-on
* Add up to 24 OptiTrack cameras for advanced localization requirements (additional cameras can be purchased separately).
Group Citation: Aerospace
Related Products
Drone Research Lab
A High-Performance Platform for Accelerating Drone Research.

QDrone
This product is no longer available.
QBot 2e
THIS PRODUCT IS NO LONGER AVAILABLE.
Quanser AERO
THIS PRODUCT IS NO LONGER AVAILABLE.

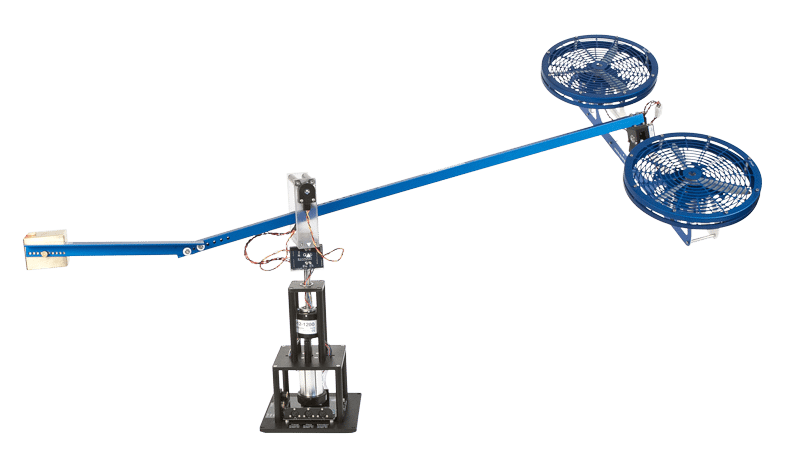
3 DOF Hover
Flight dynamics and control of vertical lift-off vehicles