QLabs Virtual Qube-Servo 3

Virtual platform for distance and blended undergraduate control systems courses
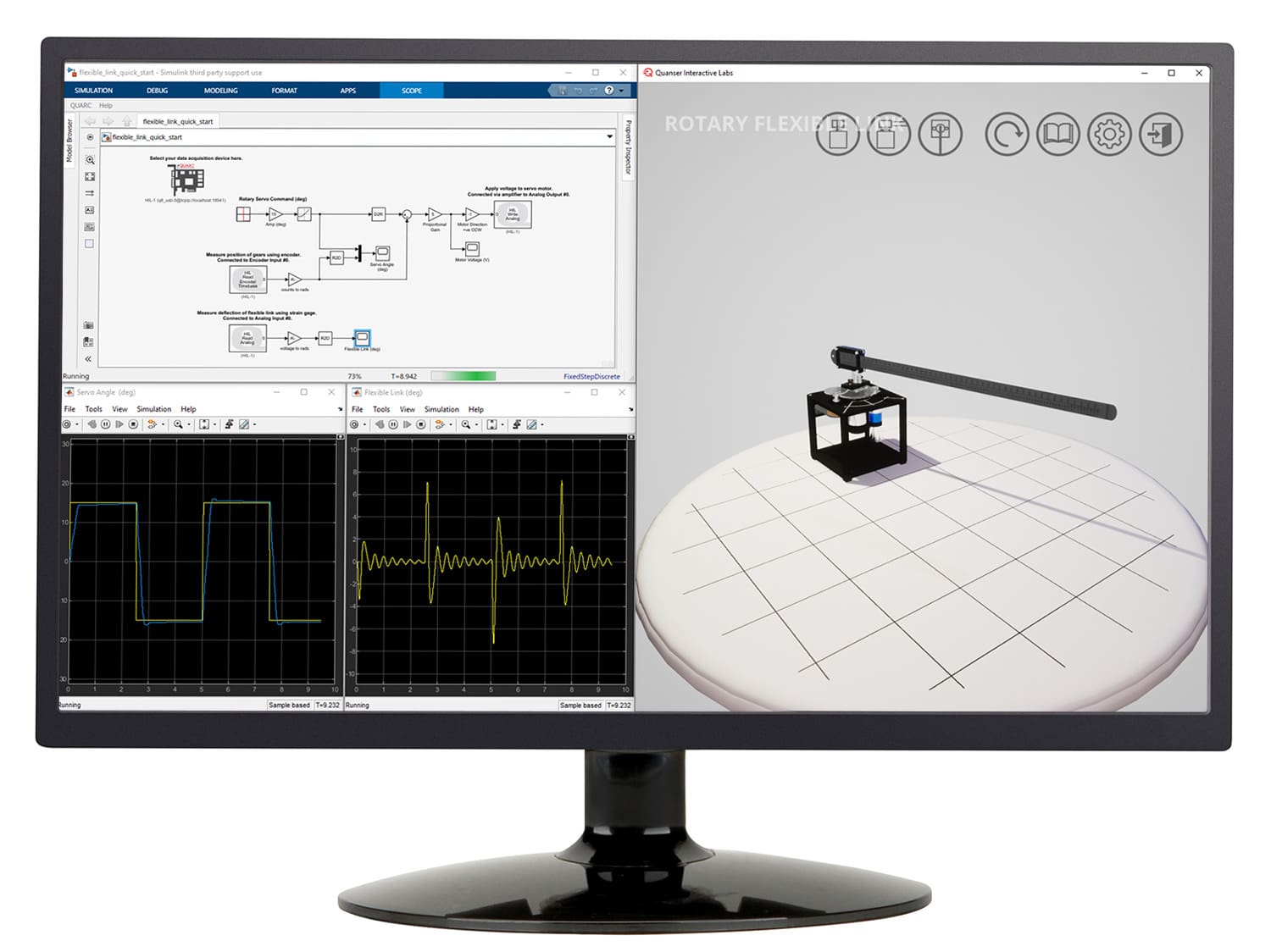
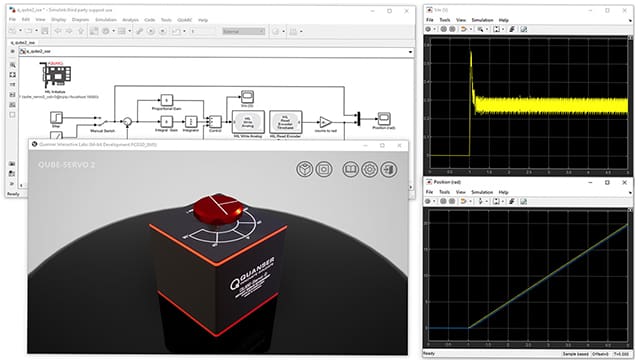
QLabs Virtual Qube-Servo 3 is a fully instrumented, dynamically accurate virtual twin of a classic QUBE-Servo 3 system. It behaves in the same way as the physical hardware and can be measured and controlled using MATLAB®/Simulink® and other development environments. QLabs Virtual Qube-Servo 3 can enrich your lectures and activities in traditional labs, or bring credible, authentic model-based lab experiences into your distance and online control systems course.
QLabs Virtual Qube-Servo 3 is available as a 12-month, multi-seat subscription. The platform is compatible with the physical Qube-Servo 3 curriculum which covers over 30 concepts including modelling, parameter identification, position, and speed control, lead control, stability analysis, steady-state error, moment of inertia, pendulum modelling, crane control, and pendulum balance control.
Product Details
Same as the physical Qube-Servo 3, the virtual system features a DC motor with the inertia disk and inverted pendulum modules. Rotary encoders measure the angular position of the DC motor and pendulum.
The motor angular velocity is measured through a software-based tachometer for both the motor and the pendulum.
- High-fidelity, credible lab experiences equivalent to use of physical lab equipment
- 12-month, multi-seat subscription
- Full access to system parameters through MATLAB®/Simulink®
- Comprehensive ABET-aligned curriculum mapped to popular control engineering textbooks
| App Download & Access to Subscription | Quanser Academic Portal |
| App OS Compatibility | Microsoft Windows 10 or Later |
| Required Software | Curriculum designed for MATLAB and Simulink R2022a or later, with Python 3 compatibility |
| Minimum Specifications | Intel Core Ultra 5, Intel Core i5, Ryzen 5 |
| 8GB RAM | |
| Intel UHD, or Iris Xe integrated GPU | |
| Recommended Specifications | Intel Core Ultra 7, Intel Core i7, Ryzen 7 |
| 16GB RAM | |
| Intel Iris Xe or Arc integrated GPU |
DC Motor (Inertia Disk) Module
- Hardware integration
- Filtering
- Step response modeling
- Block diagram modeling
- Parameter estimation
- Frequency response modeling
- State-space modeling
- Friction identification
- Stability analysis
- Second-order systems
- Routh-Hurwitz stability
- Nyquist stability
- PD control
- Lead Compensator
- Proportional control
- Steady-state error
- Load disturbance
- Robustness
- Optimal control
- Introduction to digital control
- Discrete stability
- Introduction to discrete control
Pendulum Module
- Moment of inertia
- Pendulum modeling
- State-space modeling
- Pendulum balance control
- Swing-up control
- LQR state-feedback balance control
- Pole-placement state-feedback balance control
Group Citation: Software
Explore more: All Research Paper
Related Products

Rotary Servo Base Unit
Foundational modular control experiment

Rotary Inverted Pendulum
A classic modeling and control systems experiment

Qube-Servo 3
The quickest path to practical controls
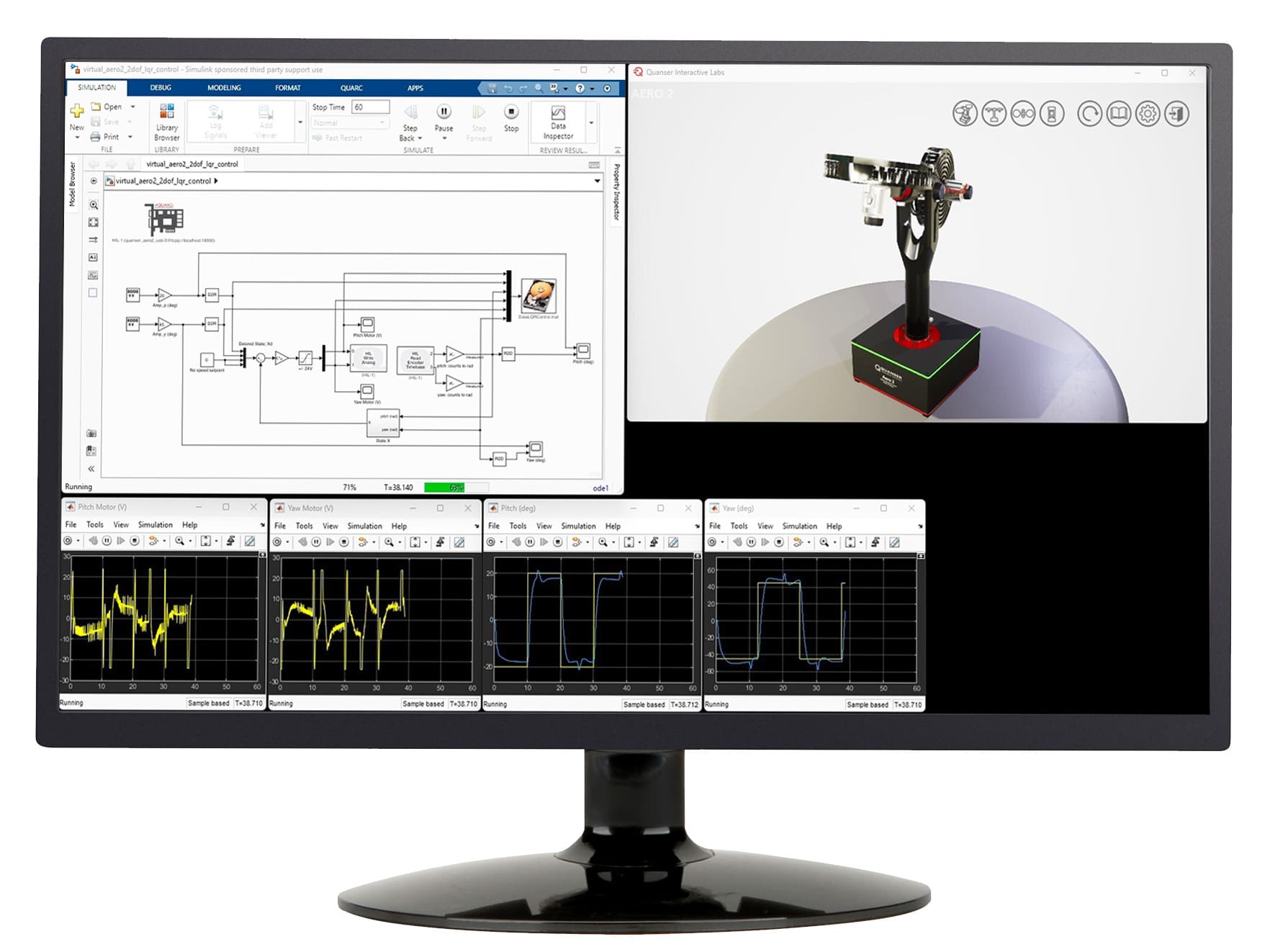
QLabs Virtual Aero 2
Virtual platform for distance and blended undergraduate aerospace and controls courses
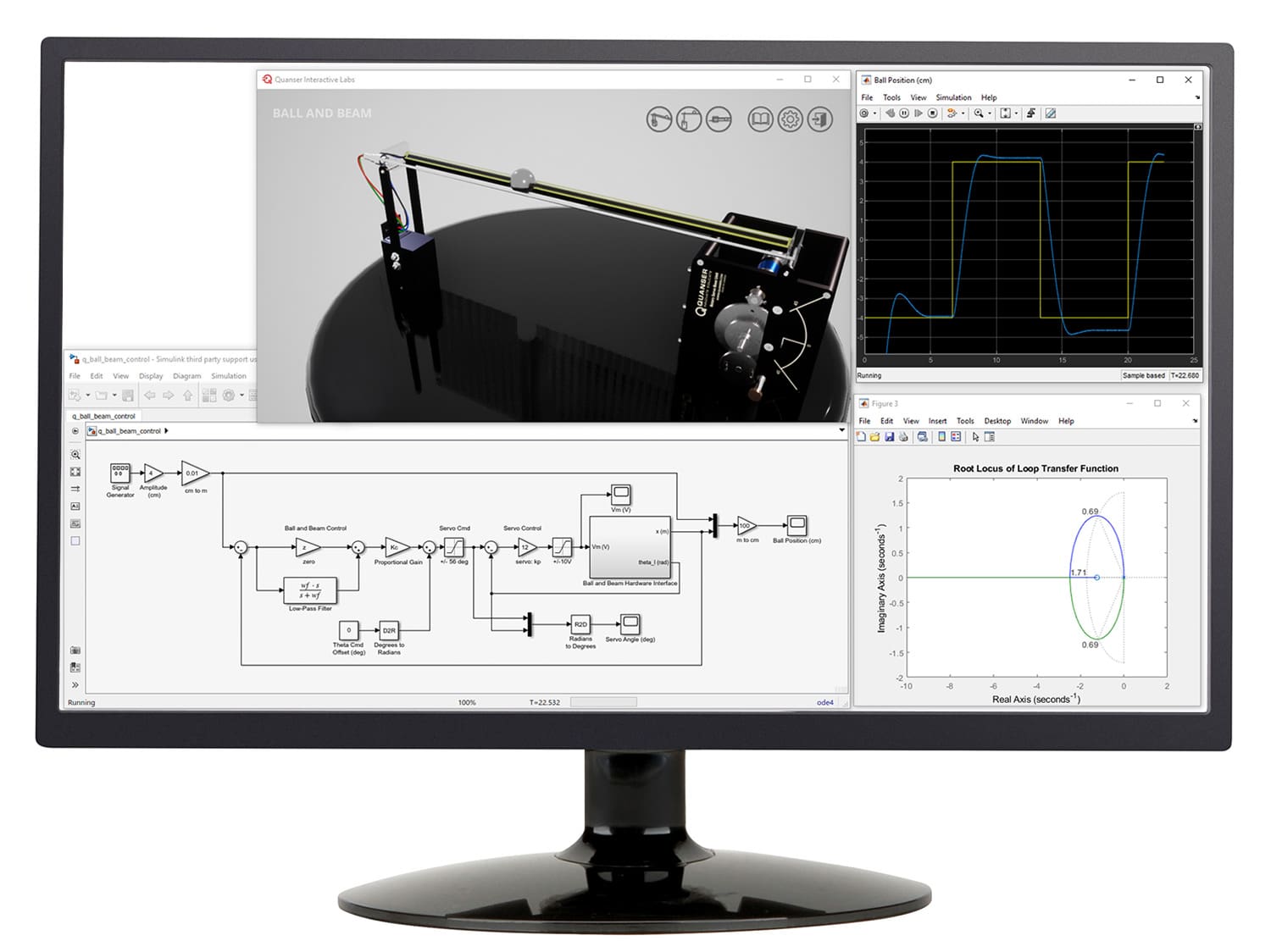
QLabs Virtual Ball and Beam
Virtual platform for distance and blended undergraduate control systems courses