As a founding member of the Lassonde School of Engineering, the Earth and Space Science and Engineering (ESSE) department at York University in Toronto plays a key role in offering a school-wide fourth-year control theory course. With the COVID-19 pandemic requiring schools across Canada to move to an online format, the department was faced with the challenge to offer a meaningful remote laboratory experience to over 180 students enrolled in the course. By adopting Quanser Interactive Labs (QLabs), as well as remote access to physical Quanser hardware, the department was able to offer a successful hybrid laboratory experience as well as reinventing their approach to engineering labs.
Challenge
Theory, Practice, and Experimentation Crucial for Control Theory Education
In the summer of 2020, Prof. Jinjun Shan, Chair of York University’s ESSE department asked Quanser’s help to offer his control theory course completely online for the Fall 2020 semester. The 3-credit course, Introduction to Control Systems (ENG 4550), introduces students to classical control theory. From dynamic system modeling to modifying system behavior through feedback, the goal of the course is to develop the basic understanding of control system theory and its role in engineering design. A key element of the course is a series of laboratory sessions where students are exposed to many practical control theory problems by experimenting with a physical hardware plants. In the first three labs, students are introduced to the MATLAB®/Simulink® environment as well as Quanser’s QUARC Real-Time control software, followed by seven lab sessions covering system modelling and validation, position control, and speed control of a DC servo motor.
In the last few years, enrollment numbers have steadily increased, especially as more students from across the school of engineering are required to take the course. According to ESSE’s laboratory technician Ian Tomaszewski, the last offering prior to the COVID-19 pandemic saw over 180 registered students. Given the class size, the logistics of managing the laboratory component of the course has always been a major undertaking. What further complicated the matter was the strict rules implemented by York University for accessing the laboratory facilities during the pandemic. This meant Prof. Shan had to devise a remote solution that gave students an authentic experience conducting the hands-on portion of his course.
Solution
A Hybrid Approach: Importance of Real Hardware and Flexibility of Virtual Twinning
When Prof. Shan and his team started to design the remote laboratory for the course, he insisted that there must be a hands-on component where students interact – albeit remotely – with real hardware. In fact, it wasn’t until Prof. Shan took over the control course a few years ago that he introduced a hands-on component to ENG 4550. According to Prof. Shan, “there are so many tools that you could use to design and simulate a controller, such as MATLAB® and Simulink®, but I want students to see for themselves how a physical electro-mechanical system responds when they implement a controller on it, even if it’s a simple DC motor.” Other rudimentary but important factors, which Prof. Shan points out, include asking students to follow instructions in a manual to make connections between the amplifier, plant, and data acquisition system.
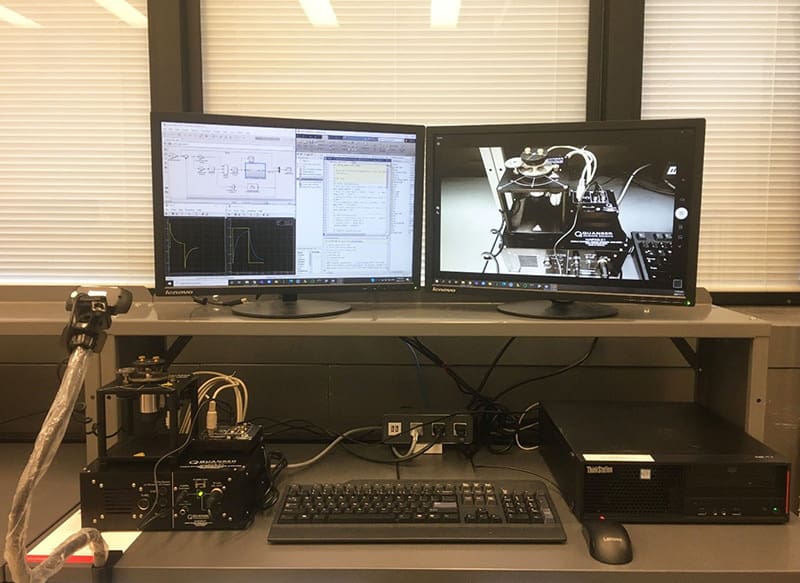
Tasked with implementing a robust solution, Tomaszewski’s initial strategy was to use their existing Quanser Rotary Servo Base Units, setup a PC with a webcam, have students use the Windows Remote Desktop Connection app to remotely connect to the lab PC, and use the Zoom teleconferencing software program to meet with their lab instructor (Figure 1).
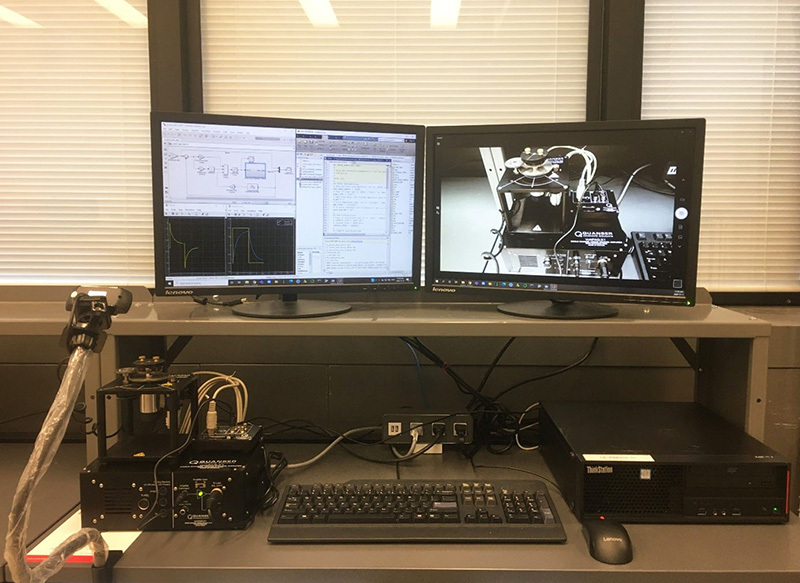
Figure 1: Remote lab setup
After several successful trials, 26 stations were setup for the Fall semester. However, the logistical issues of scheduling individual remote lab sessions with a large class size and limited servo units remained. To alleviate the issue, Prof. Shan decided to incorporate a simulation component in the course. Luckily, the digital twin of the Rotary Servo Base Unit had just been released. After a brief trial, Prof. Shan was confident that the QLabs Virtual Rotary Servo Base Unit (Figure 2) would offer a meaningful hardware experience to students remotely.
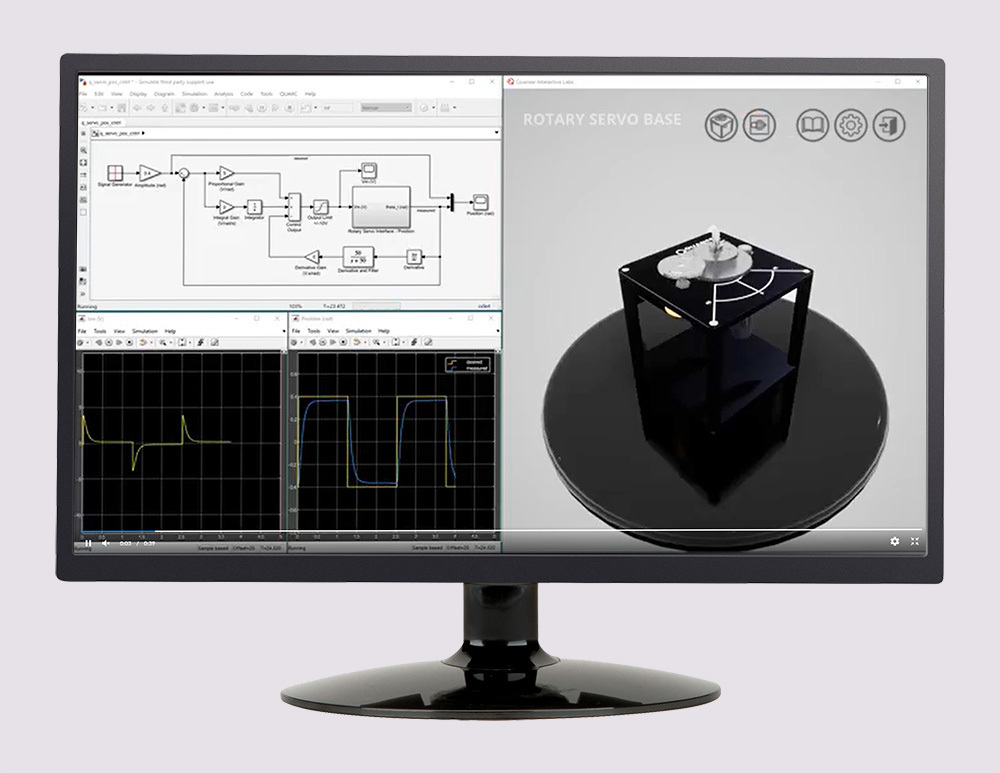
Figure 2: Virtual Rotary Servo Base Unit
Several aspects of the Virtual Rotary Servo Base Unit convinced Prof Shan that QLabs was the best solution on the market. According to Prof. Shan “the rich graphics and the overall quality of the visualization was very impressive, as if an actual unit is sitting on your desk!” Additionally, QLabs integrated seamlessly with their existing MATLAB®/Simulink® models already used in the labs. This significantly reduced the need to revamp the existing workbooks they had developed for their course. Equally important, it allowed each student to run the labs safely, independently and at their own convenience and pace.
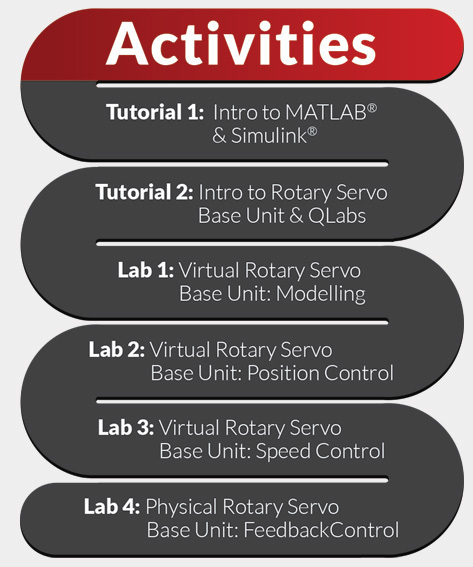
Figure 3: Lab sequence
As shown in Figure 3, six mandatory lab activities were completed by students over a total of ten sessions. In the first two tutorial sessions, students were introduced to the MATLAB®/Simulink® environment, the QUARC real-time software, QLabs, and the Rotary Servo Base Unit. A series of sessions were scheduled for students to connect via Zoom to their Teaching Assistants to ask questions. The remaining labs focused on modeling, speed control, and position control of the inertial disc of the Rotary Servo Base Unit. The first three labs were completed using QLabs, and the fourth lab was completed using remote access to the physical hardware set up in the Space Hardware Laboratory. All students were required to join Zoom sessions hosted by their TA who was physically present in the lab and remotely supported by a lab technician and course director. During the sessions students would remotely connect to their assigned computer with the physical plant to complete their assignment.
Result
Effective Experiential Learning
According to Tomaszewski, the lab sessions were completed without any major issues. Feedback from the TAs as well as the students were mainly positive too. According to Prof. Shan, “students had a very good experience with the QLabs so we will continue using it even after the pandemic. One good thing about QLabs is that it can be used anywhere and anytime. Also, it provides students a very good understanding of the hardware, greatly helping them operate the hardware later.”
In the post course survey, over 70% of the students agreed or strongly agreed that the combination of QLabs and remote hardware lab was an effective method of experiential learning. According to one student, “The experience was a very pleasant one. There were no issues with the lab work on the virtual labs. When the time came for the hardware labs, my experience with QLabs made the transition really smooth. I think using QLabs was a good decision, and it will be helpful for students taking this course in the future.” Another student responded, “The responses of the virtual equipment fascinated me, that they can vary so much, that the noises can be simulated so well. To be honest, I don’t know how they do it, but I would recommend continuing to use it in the future.”
As much as he emphasizes using actual hardware, Prof. Shan is a firm believer in digital twinning. According to Shan, digital twinning can drive innovation and performance, and help companies improve the customer experience by better understanding their needs to develop enhancements to existing products, operations, and services. The benefits of virtual twinning are not limited to teaching. They easily extend to research applications. Whether you are developing a pick and place controller for a robotic arm, or a flight controller for a drone, or even a lane keeping algorithm for an autonomous vehicle, having the ability to develop and validate models in a virtual environment is safe, reduces development time, and is less costly.
Keep in mind that digital twinning is not a new technique. NASA was the first to dabble with twinning technology as far back as the early days of space exploration. This technology (the innovated mirrored system) was used when disaster struck Apollo 13 to allow engineers and astronauts to determine how they could rescue the mission. Today, NASA uses digital twins to develop new recommendations, roadmaps, and next generation vehicles and aircrafts.
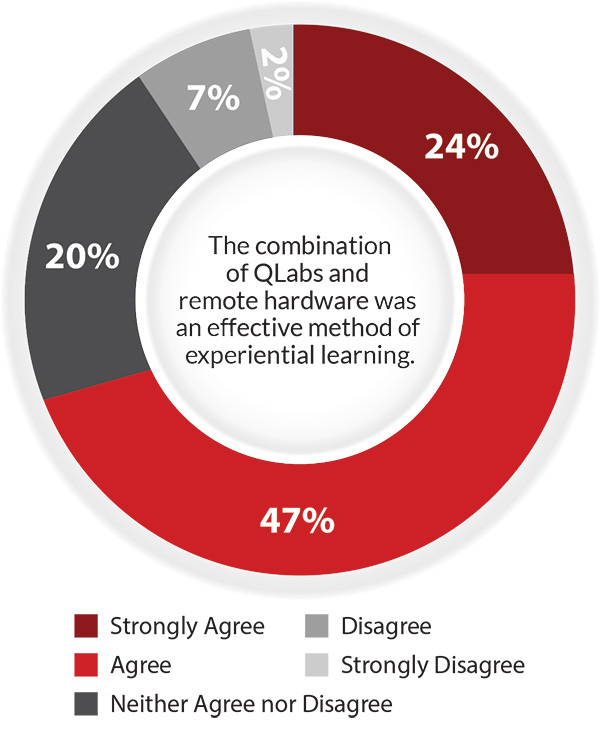
Figure 4: Student response to the effectiveness of a hybrid approach
involving QLabs and remote hardware
The current pandemic, with all its hardships, has forced most universities to reinvent their approach to engineering labs. So, what will engineering labs look like at the ESSE department moving into the future? For the Fall 2021 semester, Prof. Shan plans to implement a hybrid approach, blending the convenience of QLabs balanced with the tangible experience of using real hardware. Learning through experimentation, whether virtually or using real hardware, is one of the most effective ways of developing the cognitive skills required for critical thinking, such as problem solving and systems thinking. These abilities are key identifiers of the success of engineering graduates in industry. By providing students access to physical labs along with virtual self-paced labs, Prof. Shan hopes students will have the tools that allow them to exceed the course learning outcomes.