What makes a product a Quanser Solution? This thought experiment is in fact a real exercise we engage in as an Academic Solutions team at Quanser. There are numerous questions we consider to justify the utility of a new offering before a product is ever conceptualized and associated design project is kicked off. I want to highlight that this often creates an ecosystem of similar looking solutions that still have unique and mutually exclusive utility. Quanser’s Rotary Servo and Qube-Servo families are in that boat, and I want to elaborate on these motor systems.
DC motors are ubiquitous in modern engineering education and serve as a building block for more complex systems across a broad range of fields, including robotics, aerospace, and autonomous systems. If you’re looking for a practical solution for controls education and research, you may have visited our Controls & Dynamics products page, where you came across the Qube-Servo 3 and the Rotary Servo. Both systems are well suited for instructional and research applications, but which one is right for you?
The answer will depend on several considerations.
The Rotary Servo: A versatile, highly modular platform for teaching and research
Predating the Qube-Servo by over a decade, the Rotary Servo is one of the first Quanser solutions, having made its way around the world across many institutions over the last 3 decades and continuing to persist as a robust, modular platform for controls research and education. The Rotary Servo Base Unit and each of its add-on modules come with dedicated courseware that guide students through modelling, control design, and control implementation.

The base unit can be used alone or combined with any of its 10 add-on modules to study a wide range of control problems, including configurations that leverage multiple base units. This makes the Rotary Servo a great option for providing lab experiences that vary in complexity, scalable to meet the needs of multiple courses. This was the case for Utah State University, who invested in the Rotary Servo to equip their mechatronics lab. They continued to expand the lab with a selection of add-on modules to deliver a rich hands-on lab experience to both undergraduate and graduate students. For instructors, these modules provide cascaded increases in difficulty, with advanced applications introduced by changing the control plant. This allows students to build on the same controller design principles across different physical systems. For example, the ball-and-beam module can be used to help students learn higher-level controls topics, such as instability and non-linearity (an experience I had myself in my upper-year controls lab a few years ago!).

While the Rotary Servo base unit can serve as a validation platform for novel control methods, the add-on modules extend its support to multiple specialized research applications. The rotary inverted pendulum module, for example, was used to validate a novel model-predictive control paradigm. The ability to quickly test on physical systems without extensive overhead setup helps streamline research workflows and deepen insights, which translates into a greater number of publications.
The Qube Servo: A compact solution for teaching introductory controls and simple research applications
The Qube-Servo was developed in response to a demand for a compact teaching solution, more suitable for the undergraduate level. Firstly, the Qube-Servo 3 uses a direct-drive mechanism, which allows for straightforward & intuitive modelling by excluding gearbox effects from dynamics. While the Rotary Servo requires dedicated, separate amplifier and DAQ, these components are fully integrated into the Qube-Servo, making it more portable and reducing its workspace requirements. These differences make the Qube-Servo a cost-effective solution, ideal for making the most of a limited budget and for accommodating large class sizes. These advantages are illustrated in a case study, where these factors led Dr. Ayse Tekes to select the Qube-Servo to upgrade their controls lab at Kennesaw State University. For more information, check out this webinar, where Dr. Tekes shares her experience navigating the challenges of developing meaningful laboratory experiences that reinforce theory through experimentation, while remaining budget and faculty workload constraints.
Both systems are designed to accommodate a range of learning and research objectives, though they do so in different ways. The Rotary Servo delivers flexibility through its variety of add-on modules, while the Qube-Servo offers pedagogical flexibility through courseware that includes over 20 self-contained labs.These labs cover individual topics such as step response modeling, lead compensation, PD control, and state-space modeling. They can be delivered in any order, allowing lab experiences to evolve alongside modern engineering education.
In the absence of add-on modules, the Qube-Servo is still a good choice for a validation platform in research applications, and its versatility is further extended by its included inertia disk and pendulum modules. You can find an example of the Rotary Inverted Pendulum being used to validate a homogeneous controller here.
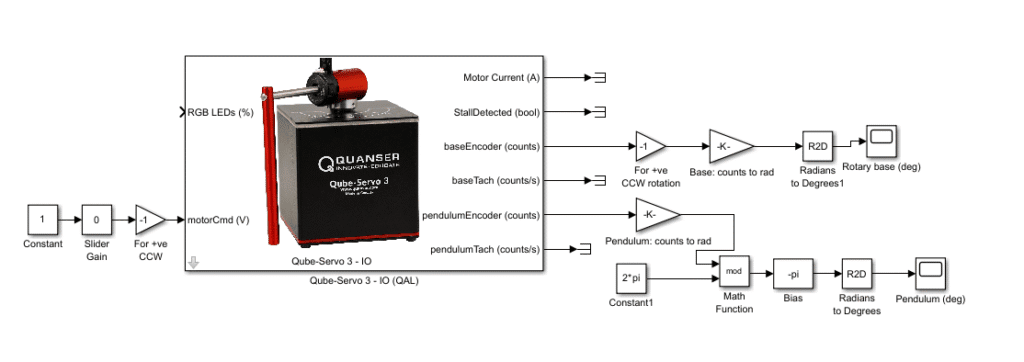
Since its release, the Qube-Servo has earned its place in countless modern labs alongside the Rotary Servo, which continues to serve a distinct and complementary role extending beyond basic applications to solve more sophisticated challenges. They are both great platforms for teaching and research due to the similarities they share with the rest of the Quanser ecosystem: they are built using Quanser’s open architecture framework that allows users to develop their own real-time controllers, compatible with MATLAB Simulink through QUARC, Quanser’s real-time control software for Simulink. Both solutions include comprehensive ABET-aligned courseware covering topics across modeling, classical control, and advanced control topics, with labs that are easy to deploy on physical hardware or digital twin simulations.
TL;DR – Choose the one that’s right for your lab
Ultimately, the Qube-Servo is ideal if you’re looking for a compact, cost-effective solution to kickstart or upgrade your controls lab and integrate ready-to-deploy material in your course efficiently. The Rotary Servo is a good choice if you plan to extend its teaching and research capabilities to more advanced controls topics. If you have any questions about applications or want to see some real-life demo, please don’t hesitate to contact us!
| Rotary Servo | Qube – Servo 3 | ||
| Hardware | Architecture | Stand-alone workstation components (amplifier and DAQ) required | Integrated hardware with internal amplifier and USB DAQ |
| Gearbox | Internal and external gearbox | Direct-drive | |
| Amplifier Type | Linear | PWM | |
| Sensors |
|
|
|
| Included Modules |
|
|
|
| Add-on Modules |
|
None | |
| Interfaces | Quanser DAQ (e.g. Q2-USB) | USB-C | |
| Workstation Space Requirements |
|
|
|
| Courseware | Courseware Focus | Control design and more complex modeling | Introduction to modeling and control |
| Lab Format | Longer, progressive labs | Short, self-contained labs | |
| ABET Alignment | Yes | Yes | |
| Software | Controller Support | Simulink with QUARC |
|
If you are a user for the legendary Qube Servo 2, this is the blog that will take you for a discussion on the Qube-Servo 2 and the Rotary Servo.