Reaching Back
All my fellow classmates tuned in to the last few lectures of Praxis IV (engineering design course) with excitement, near the end of my second undergraduate year at the University of Toronto. None of the material was going to end up on a test. We saw videos and cutting-edge research from around the world. We chose our specialization in the third year, making the choice nerve-racking as this was a pretty permanent selection in my program. I learnt about carbon nanoparticles in lithium battery design, 200-feet concrete pillars that minimized resonant vibrations from ocean currents, and modern urinals that minimized splash-back (you read that correctly). Near the end of this two hour seminar, a 30-second clip helped me make up my mind. A couple of researchers demonstrated an early prototype of the MIT Skywalker. The solution provided ecological gait-therapy for neurologically injured individuals who couldn’t walk. This motivated me to explore robotics courses being offered in my program. I picked Engineering Science’s Aerospace option as they did not offer one for Robotics back then. I was very lucky to have this experience, which kickstarted my Robotics Education experience.
MIT Skywalker
It wasn’t until the final year that AER525 – Introduction to Robotics was offered. I put a variety of concepts from earlier years towards a manipulators application context. This included linear algebra, kinematics, dynamics, motion planning and control, all at once. I took the course with four other Aerospace students, but about 25 others mixed in from Mechanical and Electrical majors through the Core-8 engineering program. Most students struggled with recalling the fundamentals from previous years due to reasons that are at best, complicated. Although my personal experiences related to that course, as well as those in this blog are in relation to Manipulators, this struggle extends well into other engineering fields as well.
In a recent hangout, one of our friends and colleagues, Euan Lindsay, reminded Quanser Academic Application engineers, “It (engineering) isn’t about problem-solving, it is about problem-definition”. I want to elaborate on the complex problem regarding the creation of engineers armed with a Robotics Education they can bank on. Ultimately, I’m making an argument to make it more accessible to students, and hence, reachable (pun-intended).
Reachability in Time
In AER525, I was exposed to the Denavit-Hartenberg (DH) convention for the first time. This was immediately followed by numerous examples of applying the formulation towards the schematic of manipulators. The course also gave us opportunities to work with the simulation of an 18 DOF manipulator who’s 6 modular units (each unit including 2 revolute and 1 prismatic joints) could be locked/unlocked. This let us practice our DH framework skills on manipulators of varying configurations with ease. Although I ended up being a Teaching Assistant for that course three times in the future, it wasn’t until I started my role as a curriculum developer and R&D engineer at Quanser that I understood the full extent of this education.
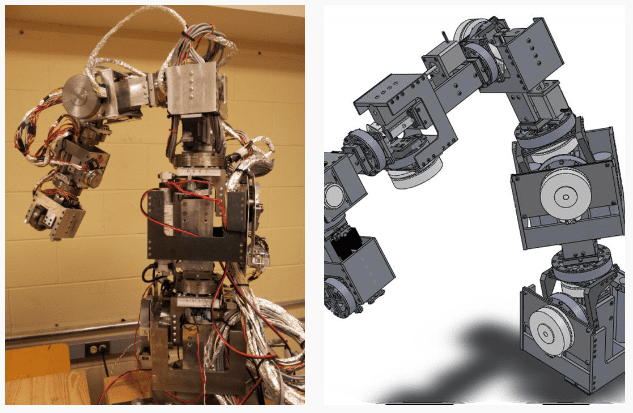
18 DOF Reconfigurable Manipulator at the Aerospace Mechatronics Laboratory (Sanford Fleming 4003)
In my first year at Quanser, our founder asked me to get our stationary quadcopter (3DOF Hover) to maintain a user-specific pitch and roll, while continuously yawing in place. I knew nothing about quadcopters (yes, even with my Aerospace background), but I knew the device was stationary. So I pulled out the big guns, the DH convention, and modeled the 3DOF hover as a serial manipulator. About an hour later, I had the 3DOF Hover replicating the desired motion. This entry point led to my interest in quadcopters in general, and spearheading the development of Quanser’s autonomous flight stack for the QDrone and Autonomous Vehicles Research Studio. My associated excitement was also displayed in the form of numerous blogs on these devices.
If I had not received the opportunity to immediately apply the DH convention to problems in the domain back when I first took AER525, I am not sure if my career trajectory and associated projects would have taken full bloom. Sure, this could be said about quite a few factors, but primarily, I wish I had the opportunity to engage with such devices (simulations or hardware) right where the fundamentals were first introduced. For example, introduce a robotic manipulator to students first taking on Linear Algebra in the first year, and show them the power of rotation matrices and basis frames applied to such a device. Give a 1/10th scale self-driving platform to your second year students learning about Brushed and Servo motors in an Intro to Mechatronics Design course and watch their motivation bloom as they explore the fundamentals in speed/steering control.
Reachability in Space
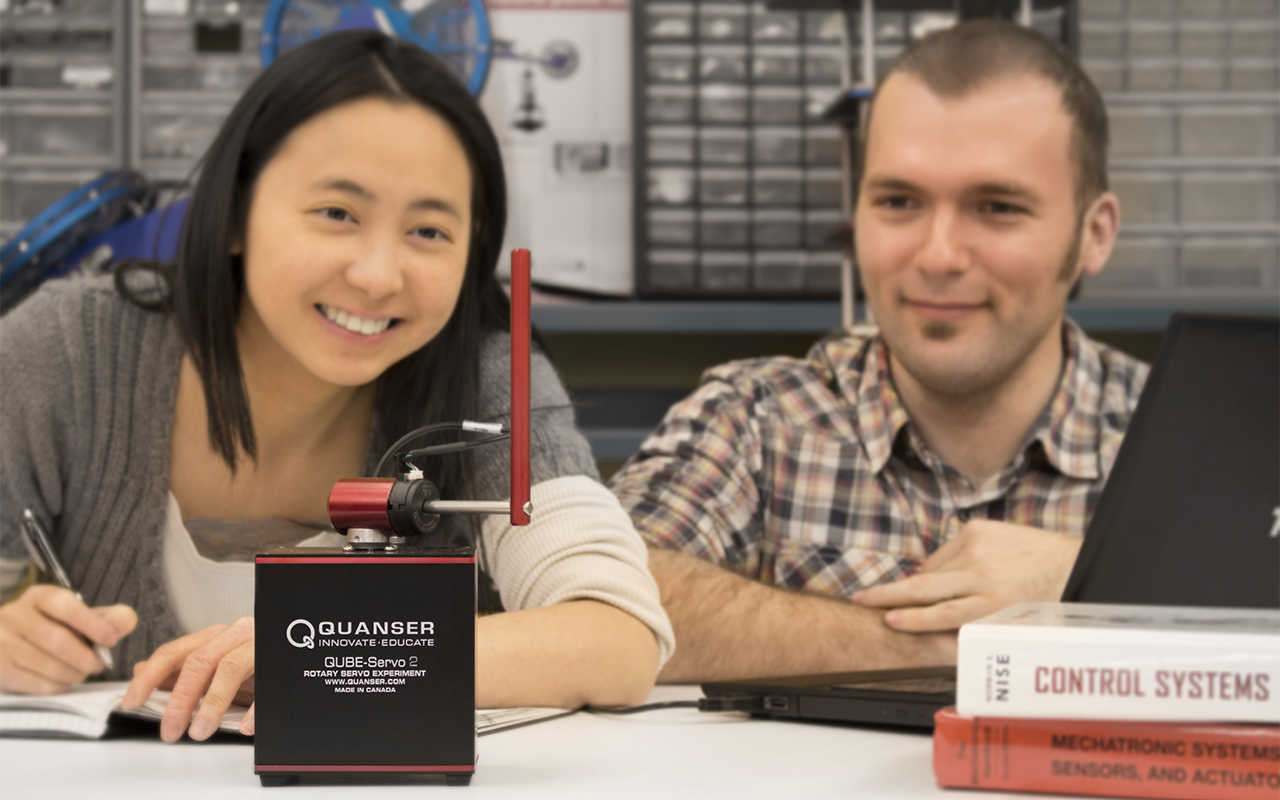
That brings me to meaningful hardware experience. I got very little of this throughout my program, and to be fair, Engineering Science is a research-focused theory-driven program. One course that sticks out for me was AER372 – Introduction to Control Systems. The labs for this course utilized Quanser’s linear cart, over four labs exploring modeling, PID control, and state-space control. This hardware exposure enhanced my overall experience with control systems enough that I ended up taking three more courses (highest in concentration in my Aerospace degree compared to anything else, even Aerospace itself). That controls interest went on to be the defining factor behind my career, writing teaching content and developing Quanser’s flight stack, self-driving stack and more over the last decade.

Quanser Linear Cart and Inverted Pendulum Stations in the Systems Control Lab (Bahen Center 3114)
Hardware experience, not only in the form of exploring concepts but doing something meaningful with it can also go a long way in helping students not only retain concepts post-graduation, but doing meaningful things in their careers with that knowledge.
Reachable Conclusion
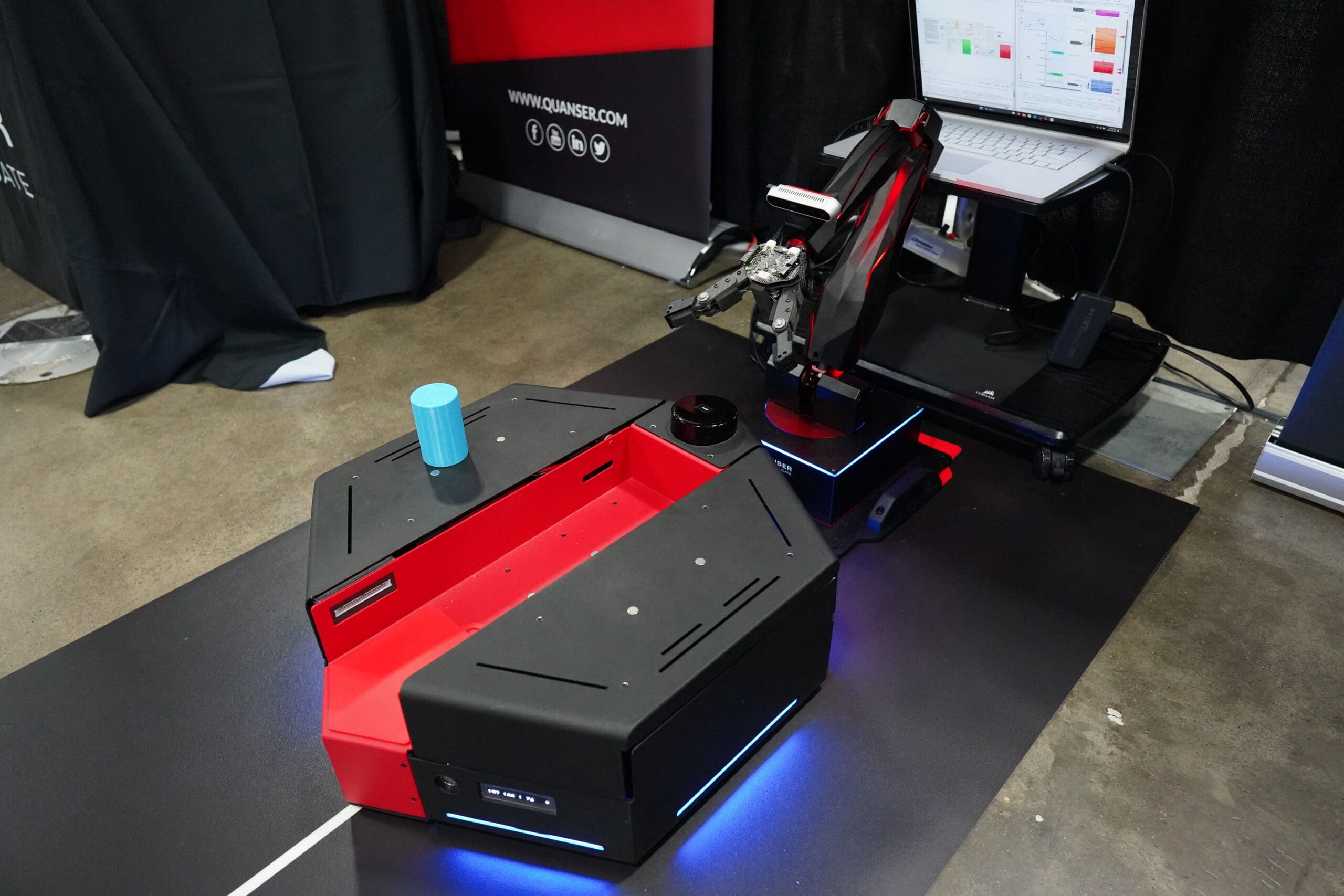
The best courses I have taken in my undergraduate and masters program, are often the ones I have the easiest time recalling. On the flip side, I get a pit in my stomach recalling why I struggled with others, as my mind actively tries to avoid talking about it. There are parts of an engineering education experience that in my opinion, enable students to retain information and apply it. Traditional engineering programs arm students with theory but are often missing the practical applications. They also introduce application contexts in Robotics quite late in my own personal opinion. Great courses and programs on the other hand (shout out to Prof. Collins for CIV102, Prof. Barfoot for AER372, and Prof. Emami for AER525) at the University of Toronto) offer reachability in both in space and time. They take a dissection approach to explore complex systems as supposed to building up fundamentals all in the hope of some abstract future fourth-year course reward (chasing a carrot). If you are an academic, and you have the opportunity for course reform, please bring hardware and real-world applications sooner, leading to authentic experiences where student motivation, attention and learning will maintain more steady levels throughout. These ideas and more are embedded at the root of our curriculum design philosophy, and are incorporated into solutions such as our Intro To Robotics Teaching Lab as well as Mobile Robotics Lab. Check them out!
Good luck, and talk soon,