
Introduction to Robotics Teaching Lab

Flexible, Plug-and-Play Robotics Lab for Multidisciplinary Teaching
Introduction to Robotics Teaching Lab is designed for educators looking to deliver hands-on robotics across undergraduate mechanical, electrical, mechatronics, and computing programs. With comprehensive academic resources, instructor materials, and Virtual QArm, it supports practical learning across multiple courses and teaching labs, including hybrid delivery and individual practice. Its compact, classroom-safe benchtop design allows multiple units in a single lab, while an integrated sensor suite and camera package enable modern manipulator robotics teaching with minimal setup.

Gallery





Product Details
The Introduction to Robotics Teaching Lab supports a complete undergraduate learning path in manipulator robotics, from forward and inverse kinematics and differential kinematics/statics to pick-and-place, visual servoing, path planning, and collision monitoring. A comprehensive, ABET-style courseware package with scaffolded, modular structures, along with instructor resources, makes it suitable for foundational teaching while also supporting more advanced work in collaborative and AI-driven manipulation.
Its portable benchtop design makes hands-on deployment practical across classrooms, labs, and departments. Student-proof hardware that is safe, flexible, and mechanically durable helps reduce maintenance and setup time in crowded labs, while allowing a single lab to support both lectures and project-based learning across departments. Virtual QArm extends access through hybrid learning, remote use, and additional individual practice, while also helping improve lab efficiency through pre-lab preparation. For programs looking to go further, simple USB connectivity and mounting on the QBot Platform provide a smooth path to mobile manipulation and warehouse automation, and an easy upgrade path for existing mobile robotics labs.
| Turnkey Hardware | |
| Infrastructure |
|
| Digital Twin Subscription | |
| Software Licenses |
QUARC™ Complete Lab License
|
Fundamental labs
- Forward Kinematics, Workspace Identification & Lead Through
- Inverse Kinematics & Teach Pendant
- Differential Kinematics
- Visual Servoing
Advanced labs
- Payload sensing
- Object Detection
- Path and Collision monitoring
- Multi-agent collaboration
Content
- Concept reviews
- Lab procedures
- Recommended Assessments
- Coding Exercises
- Robot Modeling and Control by M. W. Spong, S. Hutchinson, and M. Vidyasagar
- Introduction to Robotics: Mechanics and Control by J. Craig
- Introduction to Autonomous Mobile Robots by R. Siegwart, I. R. Nourbakhsh, and D. Scaramuzza
Group Citation: Manipulator Robotics
Explore more: All Research Paper
Related Products
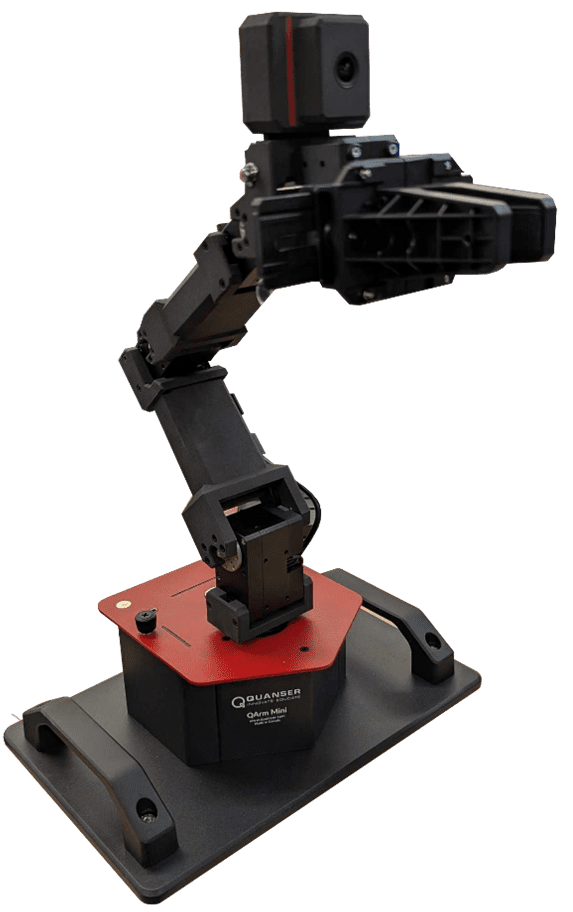
QArm Mini
Safe and academically focused robot designed to bring interactive hands-on learning to undergraduate manipulator courses

QArm
Modern Manipulator Arm for Robotics Courses and Research
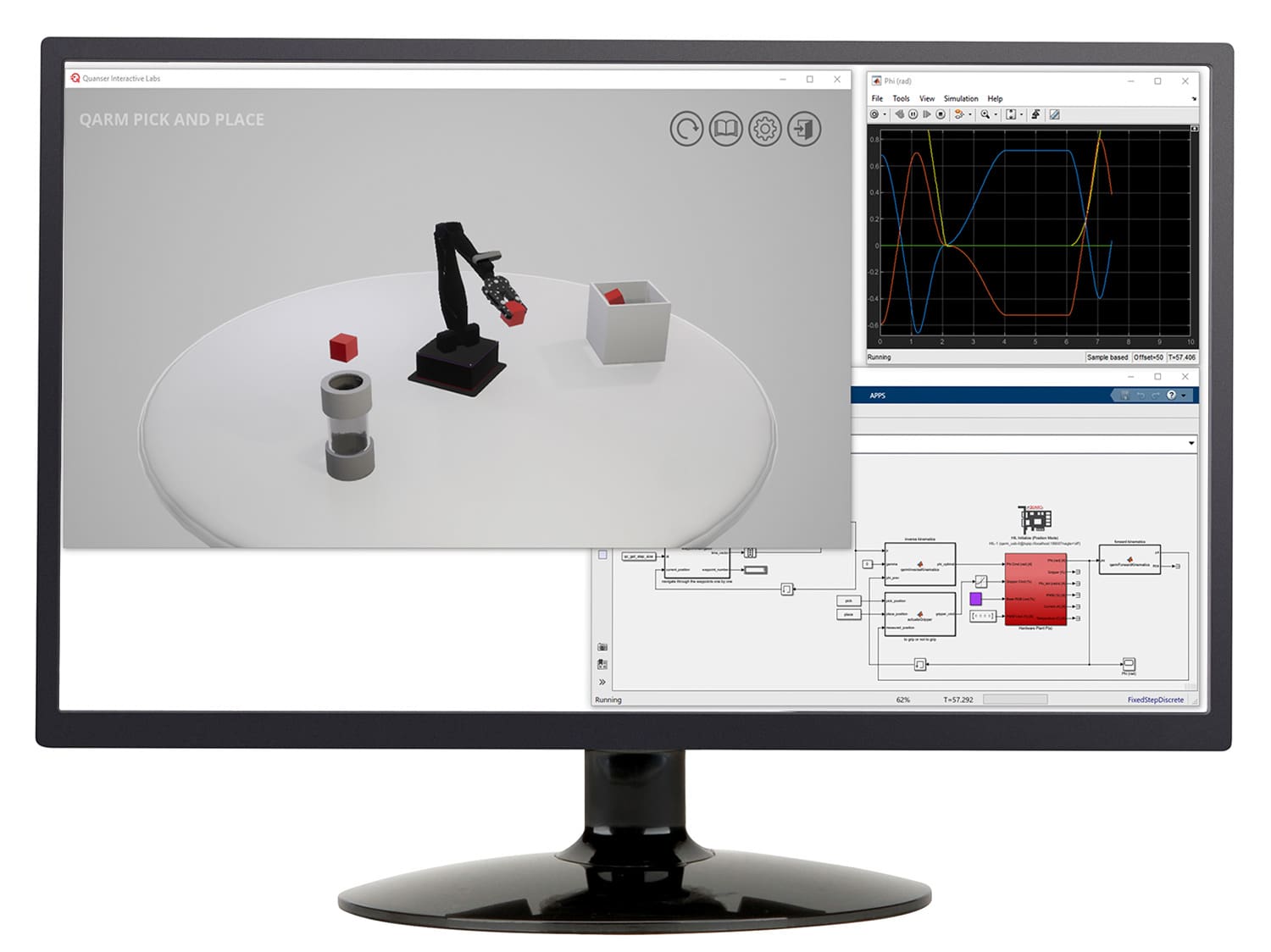
QLabs Virtual QArm
Virtual platform for distance and blended undergraduate robotics courses

Mobile Robotics Lab
Integrated Robotics Ecosystem for Education, Research, and Project Based Learning.

QBot Platform
High-performance Autonomous Ground Robot for Indoor Labs

